位相幾何学
トポロジー2
INTRODUCTION
”トポロジー”noteにて多様体をトポロジー的に扱う方法を説明しましたが、 このノートではもう少し位相幾何学っぽいトピックを取り上げました。
単体的複体
\(\mathbb {R}^N\)を実ベクトル空間と見たとき、 \(\mathbb {R}^N\)の\(p\)個の点からなる集合\(\{v_0,\cdots ,v_p\}\subset \mathbb {R}^N\) が凸であるとは、任意に ひとつ\(v_i\in \{v_0,\cdots ,v_p\}\)を選び、それを原点に取った時、 残りの\(p\)個のベクトルが一次独立であることを 意味するとする。
凸な集合\(\{v_0,\cdots ,v_p\}\)に対し、
と書ける点全体の 集合を\(p\)単体と呼び、\(\Delta ^p=|v_0,\cdots ,v_p|\)などと書く。\(p\)単体内の点を上記の \(t_i\)を用いて \((t_0,\cdots ,t_p)\)で表すことが出来るが、これを重心座標という。 また点\(v_0,\cdots ,v_p\)を頂点と呼ぶ。
\(\{v_0,\cdots ,v_p\}\)の真部分集合\(\{v_{i_0},\cdots ,v_{i_q}\}\)(\(q<p\)) を頂点とする\(q\)単体を\(\Delta ^p\)の辺単体と呼ぶ。
定義 .1 \(\mathbb {R}^N\)の中の有限個の単体からなる族 11
\(K\)は以下の条件を満たす時単体的複体と呼ばれる。1) \(\Delta ^p\in K\)ならば、\(\Delta ^p\)の任意の辺単体もまた\(K\)に属する。
2) 2つの単体\(\Delta ^p_1,\Delta ^q_2\in K\)が交わるならば、それらの共通部分部分 \(\Delta ^p_1\cap \Delta ^q_2\)は\(\Delta ^p_1\)と\(\Delta ^q_2\)の共通の辺単体である。
2つの単体的複体\(K,L\)に対し、\(\Delta \in L\)ならば\(\Delta \in K\)である時、 \(L\)を\(K\)の部分複体という。
この単体的複体の概念は多面体や多角形の概念を一般化したものといえる。つまり\(1\)単体は辺 であり、\(2\)単体は面である。
以下\(K\)に含まれる単体全ての和集合を\(|K|=\underset {\Delta \in K}{\cup }\Delta \)と書くことに する。
単体的ホモロジー
”トポロジー”noteにおいてチェイン複体の定義を述べた。 ここでも簡単に復習しておこう。チェイン複体とは アーベル群の系\(\{C_p\}\)、及び準同型の系\(\{\pd _p\}\)
であり、\(\pd ^2=0\)を満たすものである(\(\pd _p\)の添え字\(_p\)は省略する)。基本的な事項は ”トポロジー”noteを参照されたい。 チェイン複体のイメージを最も掴みすい 例がこの節で説明していく単体的ホモロジーであろう。以下、まずその説明のための準備をいくつか 行う。
凸な集合\(\{v_0,\cdots ,v_p\}\)を頂点とする\(p\)単体を\(\Delta \)とする。\(\Delta \)の頂点に順序を 定義する。つまり\((v_{i_0},\cdots ,v_{i_p})\)の並びから\((v_{j_0},\cdots ,v_{j_p})\)の並びへの 置換が遇置換である時同値とする。この同値関係により\(v_0,\cdots ,v_p\)の順序付けは2つの 同値類に分類される。 \(p\)単体\(\Delta \)の頂点にこの順序を与えたものを向きのついた単体と呼ぶ。 \((v_0,\cdots ,v_p)\)により与えられる順序で向き付けられた\(p\)単体を \(\braket {v_0,\cdots ,v_p}\)と書く22
ここまでの記号を整理すると頂点の集合を\(s=\{v_0,\cdots ,v_p\}\)と書くと、 \(p\)単体は\(|s|=|v_0,\cdots ,v_p|\)であり、向きの付いた\(p\)単体を \(\braket {s}=\braket {v_0,\cdots ,v_p}\)と書く。
。
向きの付いた単体に対する符号を以下のように定義する。即ち、 向きの付いた\(p\)単体\(\braket {v_0,\cdots ,v_p}\)に対して、\(0,\cdots ,p\)の置換を\(\pi \)で 表し、\(\braket {v_{\pi _0},\cdots ,v_{\pi _p}}=\mathrm {sign}\pi \braket {v_0,\cdots ,v_p}\) で定義する。
\(K\)を単体的複体とし、\(K\)の全ての向き付けられた\(p\)単体により形式的に 生成される\(\mathbb {R}\)を係数 とするアーベル群を\(C_p(K)\)と書くことにする。即ち\(C_p(K)\)の元は
全体からなる集合である。ここで上記で定義した単体の負符号をここで定義したアーベル群の 逆元を表す負符号と同一視するものとする。
向きの付いた\(p\)単体\(\braket {s}=\braket {v_0,\cdots ,v_p}\)に対して、\(\braket {s}\)の境界を
で定義する。\(\pd \)は線形作用素として\(C_p(K)\)の元に自然に拡張出来る。 \(\pd \)を境界作用素と呼ぶ。 この時\(\overset {\vov {i}}{\braket {v_0,\cdots ,v_p}}\)を\(\braket {s}\)の 第\(i\)面とも呼ぶ。例えば\(N=3\)、\(p=3\)と置いて第\(i\)面が四面体\(|s|\)の面となっている ことを確認されたい。
さて、このように定義した境界作用素\(\pd \)は容易に分かるように\(\pd ^2=0\)を満たす。 以上により、チェイン複体
が得られる。アーベル群の系\(\{C_p(K)\}\)と\(\pd \)の組\((C_*(K),\pd )\)を 単体的チェイン複体と呼ぶ。 特に\(\pd \)の\(C_p(K)\)への制限を\(\pd _p\)と書くことにする。 \(Z_p(K)=\mathrm {Ker}\pd _p\)の元、\(B_p(K)=\mathrm {Im}\pd _{p+1}\)の元をそれぞれ \(p\)サイクル、 \(p\)バウンダリーと呼ぶ(次元”トポロジー”noteを参照)。 また\(H_p(K)=Z_p(K)/B_p(K)\)を\(p\)次元ホモロジー群と呼び、 その元を\(p\)次ホモロジー類と呼ぶ。
”トポロジー”noteで定義したのと同じようにオイラー数\(\chi (K)\)は
で定義される。\(\dim H_p(K)\)は\(p\)次元ベッチ数とも呼ばれる。
\(K\)を単体的複体、\((C_p(K),\pd )\)をその単体的チェイン複体とする。各\(C_p(K)\)は\(\mathbb {R}\) を係数とするアーベル群なので、その双対ベクトル空間\((C_p(K))^*:=C^p(K)\)が定義できる。 即ち\(c\in C^p(K)\)は線形作用素
である。この\(c\)に対して\(\pd ^*:C^p(K)\rightarrow C^{p+1}(K)\)を、\(a\in C_p(K)\)として
で定義する。\(\pd ^2=0\)より\((\pd ^*)^2=0\)である。従ってチェイン複体
が得られる。これを単体的コチェイン複体と呼ぶ。\(C^p(K)\)の元をコチェイン と呼ぶ。 ホモロジーと同様に \(Z^p(K)=\mathrm {Ker}\pd ^*_p\)の元、\(B^p(K)=\mathrm {Im}\pd ^*_{p-1}\)の元をそれぞれ \(p\)コサイクル、\(p\)コバウンダリーと呼ぶ。 また\(H^p(K)=Z^p(K)/B^p(K)\)を\(p\)次元コホモロジー群 と呼び、その元を\(p\)次コホモロジー類と呼ぶ。 単体的コチェイン複体は向きの付いた\(p\)単体\(\braket {s}\)に対して\(1\) (向きが逆であれば\(-1\))、他の単体に対しては\(0\) となるようなコチェインにより生成されるベクトル空間に等しい。
ド・ラームの定理再考
”トポロジー”noteで説明したド・ラームの定理は要約するとド・ラームコホモロジー群と 定数係数チェックコホモロジー群との同型であった。それはそれでいいのであるが、何を意味している のかピンと分かりにくかったかもしれない。ここではその描像がもう少し見やすいようにその 対応を具体的に与えることを試みてみよう。
\(M\)を多様体とする。単体的複体\(K\)が存在して \(\varphi :|K|\rightarrow M\)が滑らかな同相写像であるとする。 さらに\(K\)の各単体\(s=|v_0,\cdots ,v_p|\)に対して\(\varphi \)の \(s\)への制限\(\varphi |_{s}:s\rightarrow M\)が\(v_1-v_0,\cdots ,v_p-v_0\)の張る平面の中での \(s\)の近傍\(U\)上での滑らかな写像\(\varphi _s:U\rightarrow M\)に拡張できて、\(\varphi _s(U)\) が\(M\)の部分多様体となっている時、\(M\)は(滑らかに)三角形分割されているという。 \(M\)が三角形分割されている時、\(|K|\)と\(M\)を同一視することにする。
さてここで”トポロジー”noteで説明したような、開被覆\(\{M_\alpha \}\)を、 単体的複体\(K\)の各頂点\(\alpha \)に対して開集合\(M_\alpha \)を、\(M_\alpha \)が \(\alpha \)以外の\(K\)の頂点を 含まないように取る。この時まず各\(M_\alpha \)に対して \(M_\alpha \)内の\(K\)の頂点\(\alpha \)を対応させる。 さらに単体\(\braket {\alpha _0,\alpha _1,\cdots ,\alpha _p}\in K\)であれば \(M_{\alpha _0}\cap M_{\alpha _1}\cap \cdots \cap M_{\alpha _p}\neq \emptyset \)であるように取り、 それぞれの \(M_{\alpha _i}\)に対応する点\(\alpha _i\)を頂点とした向きの付いた\(p\)単体 \(\braket {\alpha _0,\cdots ,\alpha _p}\)を対応させる。このような対応のもと、定数係数 チェック複体と単体的コチェイン複体とは同一視できる。即ち定数係数チェック複体の元は
と書けた。ここで\(c_{\alpha _0\cdots \alpha _p}\)は添え字の入れ替えにおいて遇置換であれば\(+\)、 奇置換であれば\(-\)符号が付くものとする。”トポロジー”noteではそのような制限を与えてなかった が、このような制限を加えてもそこでの議論になんら影響を与えない。 一方で、\(p\)単体\(\braket {\alpha _0,\cdots ,\alpha _p}\)に対して \(c_{\alpha _0\cdots \alpha _p}\)を与えるコチェインを考えれば、これらは1対1に対応するのが 分かる。この同一視のもと、定数係数チェック複体の境界作用素\(\delta \)と単体的コチェイン複体の 境界作用素\(\pd ^*\)との定義は一致する。
以上のような定数係数チェック複体と単体的コチェイン複体の同一視により、ド・ラームの定理は ド・ラームコホモロジー群と単体的コホモロジー群との同型 \(H^p_d(M)\simeq H^p(K)\)(\(H^p_d(M)\)はド・ラームコホモロジー群)を意味することが分かる。 ここでの目的はその対応を具体的に与えようということである。 そこでまずは”トポロジー”noteで与えた対応を具体的に計算していくことにする。
まずは(”トポロジー”noteの記号をそのまま使って) \(H^0_d(\mathrm {Ker}\delta ^0_{p+1})\simeq H^p(K)\)に対して
\(\delta c_1=c\)なる\(c_1\)は”トポロジー”noteによれば\(1\)の分割\(\{\rho _\alpha \}\)を用いて
と書けた。 従って(”トポロジー”noteで定義した\(j\)に対して)\(j[c]=[dc_1]\)の代表元は
となる。同様にして\(j\)を次々に作用させていけば、
が代表元として対応する。 最後にこれを\(\Omega ^p(M)\)の元に対応させると
が最終的に対応する。 この対応により\(\alpha (c)\)を
と書くことにする。符号は後の整合性のためである。\(\alpha \)はこの式により自然に \(\alpha :C^p(K)\rightarrow \Omega ^p(M)\)へ拡張出来る。
一方\(\int :\Omega ^p(M)\rightarrow C^p(K)\)を\(\omega \in \Omega ^p(M)\)に対して
で定義する。ここで\(\omega _{\alpha _0\cdots \alpha _p}\)は\(\omega \)の \(\braket {\alpha _0,\cdots ,\alpha _p}\)への制限である。 この\(\int \)はストークスの定理によりチェイン写像であることが容易に分かる。 即ち\(\delta \circ \int =\int \circ d\)である。
この時以下の性質が証明できる。
1) \(d\alpha =\alpha \delta \)
2) \(\int \circ \alpha =1\)
まず性質1)は\(\alpha \)がチェイン写像であることを意味している。2)の性質により\(\int \)及び \(\alpha \)のコホモロジー群への誘導を\(\int _*\)、\(\alpha _*\)と置けば(ド・ラームの定理により) それらが同型写像であることを意味している。以下で性質1)、2)を証明しよう。
1)の証明。(10)に対して簡単に分かるように
である。一方
従って
ここで右辺の最後から二段目の第二項目は\(\alpha _i\)についての和をまとめると \(\sum _{\alpha _i}d\rho _{\alpha _i}=d\sum _{\alpha _i}\rho _{\alpha _i}=0\)により消える。 以上により性質1)が証明出来た。
2)の証明。帰納法で証明しよう。まず
に対して\(\alpha (c)=\sum _\alpha \rho _\alpha c_\alpha \)となる。従って
ここで点\(\alpha \)は\(M_\alpha \)にのみ含まれるので\(\rho _\beta (\alpha )=\delta _{\alpha \beta }\) となる。従って
となり性質1)を満たす。次に\(p-1\)単体まで性質1)が成立しているとする。 \(C^{p-1}(K)\)の基底は、\(p-1\)単体\(t\)がある特定の\(p-1\)単体\(r\)に等しければ\(1\)で、 そうでなければ\(0\) に値をとる\(\delta _{tr}\)に対して(向きが逆であれば\(-1\))
で与えられる。このような基底に関して証明すれば十分である。まず\(\int \circ \alpha =1\)は \(c=\underset {\braket {s}}{\oplus }c_s\)と書けば
より
を意味していることに注意しよう。従ってこれが\(p-1\)次まで成立していると仮定すれば
となる。一方で\(\braket {s_i}\)を\(\braket {s}\)の第\(i\)面であるとすると
これは\(\braket {r}\)を第\(i\)面として持つ\(p\)単体\(\braket {s}\)に対してだけ係数が\((-1)^i\)で、他は 全て\(0\)である。そのような\(p\)単体を\(\braket {\sigma _1}\)、\(\braket {\sigma _2}\)、\(\cdots \)と置き、 それらが\(i\)面、\(j\)面、\(\cdots \)として\(\braket {r}\)を持つとすると
となる。ここで\(\alpha (c_{\sigma _i})\ \ (i=2,3,\cdots )\)に現れる1の分割に関して、 \(p\)単体\(\braket {\sigma _1}\)に対して \(\braket {\sigma _i}\ \ (i=2,3,\cdots )\)の頂点の添え字を持った 1の分割で\(\braket {\sigma _1}\)上で恒等的に\(0\)になるものが存在するので
また上と同じで \(p\)単体\(\braket {s}\)に対して\(s\neq \sigma _1\)であれば\(\sigma _1\)の頂点の添え字を持った 1の分割で\(\braket {s}\)上で恒等的に\(0\)になるものが存在するので
従って結果として
が得られる。以上により性質2)が証明された。
さて\(\int \circ \alpha (c_{\sigma _1})\)を具体的な形で与えてみよう。 \(\braket {\sigma _1}=\braket {\alpha _0\cdots \alpha _p}\)と置き、 \((\beta _0\cdots \beta _p)\)が\((\alpha _0\cdots \alpha _p)\)の並び替えとすると \(\int \circ \alpha (c_{\sigma _1})\)は
となる。 ここで適当な\(p+1\)単体\(\braket {t}=\braket {\alpha \alpha _0\cdots \alpha _p}\) とすれば \(\pd \braket {t}=\braket {\sigma _1}+\cdots \)となるので上式は
従って
という非自明な関係式が得られる。
ホモトピー
復習
”トポロジー”noteでちょっとだけホモトピーに関しても説明した(是非”トポロジー”noteを参照 されたい)。ここではもうちょっとだけホモトピーに関して説明を付加したいと思う。
まずホモトピーの定義を復習しよう。
定義 .2 \(I=[0,1]\)とする。 多様体\(M,N\)に対して2つの滑らかな射\(f,g:M\rightarrow N\)に対して、滑らかな射
が存在して、\(\varphi _t:=\varphi (t,\cdot ):M\rightarrow N\)と置いた時、ある \(t_0,t_1\in [0,1]\ (t_0\neq t_1)\)に対して \(\varphi _{t_0}=f\)、\(\varphi _{t_1}=g\) である時 \(f\)と\(g\)はホモトープであるといい\(f\simeq g\)と書く。また\(\varphi \)を ホモトピーという。 因みにこのホモトープという関係は同値関係であることに注意されたい。
”トポロジー”noteでは次のことを示した。 ホモトープな射\(f,g\)のド・ラームコホモロジー群への誘導\(f^*_H,g^*_H\)はコホモロジー群の 同型
を与える。
ここで新しく定義していこう。
定義 .3 多様体\(M,N\)に対して滑らかな射\(f:M\rightarrow N\)及び \(g:N\rightarrow M\)が存在し、\(g\circ f\simeq 1:M\rightarrow M\)、 \(f\circ g\simeq 1:N\rightarrow N\)である時、 \(M\)と\(N\)はホモトピー同値であるといい、\(M\approx N\)と書く。
”トポロジー”noteで説明した変位レトラクションの概念はこの特殊な場合とみなせる。 \(f\)及び\(g\)のコホモロジー群への誘導を考えれば、上記のことより\(f^*_H,g^*_H\)が 同型写像であることが分かるので、コホモロジー群の同型
が得られる。
ホモトピー集合
定義 .4 多様体\(M\)から\(N\)への滑らかな写像\(\varphi :M\rightarrow N\)全体をホモトープという関係で 類別した時の同値類をホモトピー類といい\([\varphi ]\)と書く。またホモトピー類全体からなる 集合を\(\pi (M;N)\)と書き、ホモトピー集合という。
定義 .7 \(M\)、\(N\)が基点\(p\)、\(q\)を持つ場合には基点を保つ滑らかな写像\(f,g:M\rightarrow N\)に対して 滑らかな射
で、\(\varphi _{t_0}=f\)、\(\varphi _{t_1}=g\)でかつ\(\varphi _t(p)=q\)である時、\(f\)と\(g\)は ホモトープであるといい、\(f\simeq g\)と書く。また\(\varphi \)を ホモトピーという。基点付き多様体の間のホモトープの関係を考える時は、常に この意味におけるものであるとする。
基点付き多様体\((M,p)\)から\((N,q)\)への基点を保つ滑らかな写像全体をホモトープという同値関係 で類別したものを定義することが出来る。 この場合のホモトピー集合を\(\pi _0(M;N)\)と書く。 \(S^n\)の基点を任意に1点選び、\(M\)の基点を \(p\)とした時、 \(\pi _n(M,p):=\pi _0(S^n;M)\ (n\geq 1)\)と書き、これをHurewiczのホモトピー集合という。 \(\pi _1(M,p)\)は\(M\)上の\(p\)を通るループ、 即ち\(M\)上の道\(l:I\rightarrow M\)で始点と終点が\(l(0)=l(1)=p\) であるもののホモトピー類からなる集合とも見なせる。
\(\pi (S^n;M)\)が唯一の元のみからなる場合には、\(M\)は\(n\)連結と呼ばれる。 特に\(n=1\)の場合には 単連結と呼ばれる。\(n\)連結な場合にはその唯一のホモトピー類は 定値写像\(0:S^n\rightarrow p\in M\)のホモトピー類である。
\(M\)内の2点\(p_1\)、\(p_2\)とを結ぶ道全体からなる集合を\(\Omega (M,p_1,p_2)\)と書き、 道の空間と呼ぶ。 \(\Omega (M,p_1,p_2)\)をホモトープという同値関係で分類したものを\(\pi _1(M,p_1,p_2)\)と 書く。特に道がループである場合、即ち\(\Omega (M,p,p)=:\Omega (M,p)\)をループ空間と 呼ぶ。\(\pi _1(M,p,p)=\pi _1(M,p)\)である。
\(M\)の任意の2点\(p_0,p_1\)に対して、2つのループ\(l_0,l_1:S^1\rightarrow M\)を 定値写像\(l_0(t)=p_0\)、\(l_1(t)=p_1\)に取る。今\(M\)が単連結なので、ホモトピー \(\varphi :I\times S^1\rightarrow M\)で\(\varphi (t,\cdot )=\varphi _t\)に対して\(\varphi _0=l_0\)、 \(\varphi _1=l_1\)なるものが存在する。この時\(\varphi (I,S^1)\subset M\)上に\(p_0\)から\(p_1\)への 道\(l:I\rightarrow M\)で、\(l(0)=p_0\)、\(l(1)=p_1\)なるものを取ることが出来る。 従って\(M\)は連結である。
基本群
\(M\)上の始点と終点が\(p\)である任意の2つのループ\(l_1,l_2\)には積\(l_1*l_2\)が定義できる。 即ち最初に\(l_1\)を通り、それから\(l_2\)を通る道である。具体的に書けば
である。明らかにこの定義はループでなくても\(l_1\)の終点と\(l_2\)の始点が一致していれば定義 出来る。
\(l_1*l_2\)のホモトピー類\([l_1*l_2]\)を考えた時、明らかに \(l_i\ (i=1,2)\)を\(l_i\)とホモトープな別の\(h_i\)に 変えても同じ同じホモトピー類が得られる。即ち\([l_1*l_2]=[h_1*h_2]\)である。 従って\(\pi _1(M,p)\)には自然に積が定義できる。即ち\([l_1][l_2]=[l_1*l_2]\)として積を定義できる。 この時\(\pi _1(M,p)\)はこの積に関して群をなす。単位元は定値写像\(1:I\rightarrow p\)の ホモトピー類である。\([l]\in \pi _0(M,p)\)の逆元は\(l\)の逆道
のホモトピー類である。 このようにして\(\pi _1(M,p)\)に群構造を持たせた時、\(\pi _1(M,p)\)を基本群という。
\(M\)が連結であるとする。この時\(M\)の任意の 2点\(p\)、\(q\)に対して、\(p\)と\(q\)を結ぶ道\(\alpha \ (\alpha (0)=p,\alpha (1)=q)\) のホモトピー類\([\alpha ]\)は 写像\(\alpha _*:\pi _1(M,p)\rightarrow \pi _1(M,q)\)を
で定義できる。明らかに\(\alpha _*\)は準同型写像であり、\((\alpha _*)^{-1}=(\alpha ^{-1})_*\)が 定義できるので、\(\alpha _*\)は同型写像である。即ち\(\pi _1(M,p)\simeq \pi _1(M,q)\)である。 即ち基点の選び方に依存しない。このような時には、基本群を\(\pi _1(M)\)と書く。
簡単なホモトピー群\(\pi _1(S^1)\)を計算しよう。 \(S^1\)から\(S^1\)への写像の最も簡単な構成の仕方は\(S^1\)と\(2\pi \)を法とした\(\mathbb {R}\)とを 同一視し、\([0,2\pi ]\)から\(\mathbb {R}\)への写像\(f\)で、\(f(2\pi )=f(0)+2n\pi \ (n\in \mathbb {Z})\) の条件を満たす ものを構成することであろう。 この条件のために\(f\)は両方の端点を独立に動かすことが出来ない。従って\(f\)を変形させていっても \(n\)は変わらないことになる。逆にこの\(n\)が同じ2つの写像\(f\)、\(g\)があれば、それらは ホモトープであることが分かる。即ち\(f\)のホモトピー類に対して整数\(n\)が対応し、異なる ホモトピー類に対応する整数\(n\)は異なることになる。また\([f]\)に対応する整数を\(n\)、\([g]\)に 対応する整数を\(m\)とすれば、\([g*f]=[g][f]\)に対応する整数は\(n+m\)であることが分かる。 また容易に分かるように\([g*f]=[f*g]\)であるので44
例えば\(f(2\pi )=f(0)+2n\pi \)及び\(g(2\pi )=g(0)+2m\pi \)で\(n\geq m\)とすれば、 \(f(t_1)=f(0)+2m\pi \)なる\(t_1\)に対して、\(f\)の\([0,t_1]\)への制限に対応する整数は\(m\)である。。 さらに\(f\)の\([t_1,2\pi ]\)への制限\(f_1\)と\(g\)とに対してそれらを繋げた道\(g*f_1\)に対応する 整数は\(n\)である。従ってそれらを繋げた道はホモトピー類\([f*g]\)に属しており、これはもちろん \([g*f]\)にも属するからである。
この対応は同型写像を定義する。 以上により、同型\(\pi _1(S^1)\simeq \mathbb {Z}\)が得られる。 ここで構成した整数\(n\)はホモトピー不変量と呼ばれるものの一種である。
被覆空間
定義 .8 2つの連結な\(n\)次元多様体\(M\)、\(\t {M}\)に対して滑らかな全射\(\pi :\t {M}\rightarrow M\) が存在し、\(\pi \)が臨界点(臨界点の定義は”トポロジー”noteを参照)を持たない時、 \(\t {M}\)を\(M\)の被覆空間と呼び、\(\pi \)を射影と呼ぶ。
簡単な例をあげておこう。
1) \(\theta \in \mathbb {R}\)に対して \(\theta \ \mathrm {mod}\ 2\pi \)を対応させる写像により\(\mathbb {R}\)は\(S^1\)の被覆空間 となる。
2) \(\theta \ \mathrm {mod}\ 2\pi \)から\(n\theta \ \mathrm {mod}\ 2\pi \) へ対応させる写像により\(S^1\)は\(S^1\)自身の被覆空間となる。
補題 .2 被覆空間\(\pi :\t {M}\rightarrow M\)及び単連結な多様体\(N\)に対して、滑らかな写像 \(\varphi :N\rightarrow M\)が存在するとする。この時、\(f:N\rightarrow \t {M}\)で \(\pi \circ f=\varphi \)なるものを構成することが出来る。
構成法は以下の通りである。 まず、\(q\in N\)及び\(\varphi (q)=p\)とする。\(\pi ^{-1}(p)\)は有限集合となるが、その中の 任意の1つの点\(x\in \pi ^{-1}(p)\)を選ぶ。次に\(N\)内の任意の点\(q_1\)を選ぶと、\(N\)が連結 でもあるので\(N\)の道\(l:I\rightarrow N\)で\(l(0)=q,l(1)=q_1\)なるものが存在する。 \(\varphi \circ l\)は\(M\)の道である。\(t\in I\)に対して\(\pi ^{-1}\circ \varphi \circ l(t)\) はまた有限集合であるが、\(t=0\)の時に\(x\)を対応させて、そこから\(t\)を連続的に動かして いった時に\(\t {M}\)内に\(x\)を端点に持つ道が定義できる。\(t=1\)に対応する点\(x_1\)に\(q_1\)を 対応させる。この対応\(q_1\rightarrow x_1\)は\(N\)の道\(l\)のとり方によらない。 実際\(q\)から\(q_1\)への別の道\(s\)に対して、\(s^{-1}*l\)がループとなることに注意すれば \(N\)が単連結のなので\(l=s*s^{-1}*l\simeq s\)となる。即ち\(l\)と\(s\)はホモトープである。 従って\(s\)から誘導される\(\t {M}\)上の道も\(l\)から誘導された道とホモトープとなり、道の とり方に依存しない。従って\(f:N\rightarrow \t {M}\)を\(f(q_1)=x_1\)で定義できる。 作り方より明らかに\(\pi \circ f=\varphi \)である。
さらに次の定理が成り立つ。
定理 .1 (被覆ホモトピー定理) 被覆空間\(\pi :\t {M}\rightarrow M\)、及び任意の多様体\(N\)に対して 滑らかな写像\(f:N\rightarrow \t {M}\)及びホモトピー\(\varphi :I\times N\rightarrow M\) が与えられ、\(\pi \circ f=\varphi _0\)であるとする。 この時ホモトピー\(F:I\times N\rightarrow \t {M}\)が存在し、 \(\pi \circ F=\varphi \)となる。
証明は次のように考えればよい。 \(a\in N\)とする。\(I\)はもちろん単連結なので、 \(\varphi |_{I\times \{a\}}=\varphi (\cdot ,a):I\rightarrow M\)に対して補題() を適用すれば\(\t {M}\)の道\(l\)で\(l(0)=f(a)\)となるものを定義出来る。 後は\(N\)内の点\(a\)全体に渡って同様に道を定義していけば、\(F:I\times N\rightarrow \t {M}\) が定義出来るのがわかる。しかも\(\pi \circ F=\varphi \)である。
\(\t {M}\)を\(M\)の被覆空間とする。射影\(\pi :\t {M}\rightarrow M\)から自然に誘導される写像 \(\pi _*:\pi _1(\t {M})\rightarrow \pi _1(M)\)が定義できる。 即ち\([l]\in \pi _1(\t {M})\)に対して、\(\pi _*([l]):=[\pi \circ l]\in \pi _1(M)\) を対応させる写像である。 \(\pi _*\)は単射であることが示すことが出来る。 \(l:S^1\rightarrow \t {M}\)に対して\(\pi \circ l\)のホモトピー類が単位元であるとする。 即ち\(\varphi :I\times S^1\rightarrow M\)で\(\varphi _0=\pi \circ l\)、\(\varphi _1=0\)(\(0\) は定値写像の意味)であるとする。\(\varphi _1\)が定値写像なので\(I\times S^1\)の代わりに、 \(\{1\}\times S^1\)内の全ての点を同一視した円錐\(\Delta \)に対して\(\varphi \)を定義できる。 円錐\(\Delta \)は単連結なので、 上記補題()より\(f:\Delta \rightarrow \t {M}\)で\(\pi \circ f=\varphi \) なるものが存在する。\(f|_{\{0\}\times S^1}=l\)なので\(f\)はホモトピーであり、\(l\)は 実際に定値写像にホモトープであることが分かる。
ホモトピー群
\(\pi _n(M,p)\ (n\geq 2)\)に対して基本群と同じように群構造を持たせることが出来る。 そこでまず以下で\(S^n\)に座標を与えていこう。 \(S^n\)は\(n\)次元立方体\(I^n\)の境界\(\pd I^n\)内の点を全て同一視したものと同型である。 実際\(I^n\)は\(n\)次元球体\(D^n\)と同型であり、\(D^n\)の境界を同一視したものは\(S^n\)と同型 である(”トポロジー”note参照)。\(I^n\)の座標を\((t_1,t_2,\cdots ,t_n)\ (0\leq t_i\leq 1)\) で表そう。\(t_i\)の内少なくとも1つが\(t_i=0\)または\(t_i=1\)であればその点は境界\(\pd I^n\) に属する。\(I^n\)の境界を1点と見なすことにより、\(I^n\)と\(S^n\)を同一視することにより、 \((t_1,\cdots ,t_n)\)を\(S^n\)の座標として与えることが出来る。 従って写像\(\varphi :S^n\rightarrow M\) を\(\varphi (t_1,\cdots ,t_n)\)と書くことが出来る。
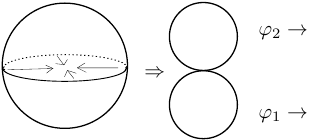
以上の準備のもと\(\varphi _1:S^n\rightarrow M\)と\(\varphi _2:S^n\rightarrow M\)との和 \(\varphi _1+\varphi _2\)を
で定義する。直感的に説明すると、\(S^n\)の基点を含んだ赤道を1点に縮めて、2つの球面 をそれぞれの基点でくっつけたものを作る。それから北半球から出来た球面を\(\varphi _1\)で、 南半球から出来た球面を\(\varphi _2\)で写したものである(下図)。
容易に分かるように\(\varphi _1\simeq \phi _1\)かつ\(\varphi _2\simeq \phi _2\)であれば、 \(\varphi _1+\varphi _2\simeq \phi _1+\phi _2\)である。従って\(\pi _n(M,p)\)に対して 自然に和を定義出来る。この時\(\pi _n(M,p)\)はこの和に関して群をなす。 単位元は定値写像のホモトピー類であり、逆元は\(\varphi (t_1,\cdots ,t_{n-1},t_n)\) のホモトピー類に対しては \(\varphi (t_1,\cdots ,t_{n-1},1-t_n)\)のホモトピー類が対応する。 さらにこの演算は可換である。\(\varphi _1+\varphi _2\)と\(\varphi _2+\varphi _1\)との間の ホモトピーは以下のようにして構成する。 \(S^n\)を回転させていき、北半球と南半球が反転したところで さらに自転軸周りに反転させていく(下図)。
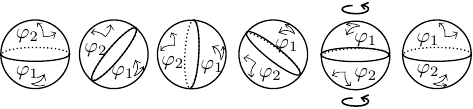
図の球に描かれた赤道は1点に縮められる領域である。 北半球の部分を\(\varphi _1\)で\(M\)に写し、南半球の部分を\(\varphi _2\)で\(M\)に写す (最終的には北半球が下側に来て南半球が上側に来る)。 従って\(\pi _n(M,p)\)に定義された和の演算は可換である。 この群構造を持った\(\pi _n(M,p)\)をホモトピー群という。
連結な多様体\(M\)内の任意の2点\(p_1,p_2\)を結ぶ道\(l:I\rightarrow M\ (l(0)=p_1,l(1)=p_2\) によって\(\pi _n(M,p_2)\)から\(\pi _n(M,p_1)\)への準同型が誘導される。 \(\varphi \)を\(S^n\)の基点を\(p_2\)へ写す写像とする。 \(S^n=\{x_1^2+\cdots +x_{n+1}^2=1\}\)(基点を\(x_{n+1}=-1\)の点とする) の下半面\(-1\leq x_{n+1}\leq 0\)の範囲に対して \(x_i=0\ (i=1,\cdots ,n)\)に対応させて\(S^n\)の上半面に対しては赤道を1点に縮める。 結果下半面は\(I\)と見なすことができ、上半面は\(S^n\)と見なせる。 \(I\)を\(l\)で写し、上半面の\(S^n\)を\(\varphi \)で写すように定義したものを\(l_*(\varphi )\)と 書けば、\(l_*(\varphi )\)は\(S^n\)の基点を\(p_1\)へ写す写像である。 この\(l_*\)を自然にホモトピー類に誘導すれば、準同型\(l_*:\pi _n(M,p_2)\rightarrow \pi _n(M,p_1)\) が得られる。同様に逆道\(l^{-1}\)によって、\(l^{-1}_*\)が定義出来るので、この対応は 同型\(\pi _n(M,p_1)\simeq \pi _n(M,p_2)\)であることが分かる。 即ち\(M\)の基点の選び方によらない。この場合にはホモトピー群を\(\pi _n(M)\)と書く。
被覆空間\(\pi :\t {M}\rightarrow M\)に対して\(n\geq 2\)の時、 \(\pi _n(M)\)と\(\pi _n(\t {M})\)が同型なことを示すことが出来る。 \(\pi _*\)の全射性は補題()による。\(N=I\times S^n\)である。 単射性は\(\varphi :I\times S^n\rightarrow M\)、\(\varphi _0=0\)(定値写像)に対して 補題()の写像\(f:I\times S^n\rightarrow \t {M}\)で\(f_0=0\)であるので成立する。
この結果の簡単な応用例は\(\pi :\mathbb {R}\rightarrow S^1\)が被覆空間となることから
である。
\(n<m\)とした時\(\pi _n(S^m)=0\)であることを示すことが出来る。\(n<m\)であるので、任意の \(\varphi :S^n\rightarrow S^m\)は全射ではありえない。従って\(\varphi (S^n)\subset S^m \backslash \{p\}\)なる\(p\in S^m\)が存在する。\(S^m\backslash \{p\}\) は1点に可縮であるので \([\varphi ]=0\)である。従って\(\pi _n(S^m)=0\)である。
多様体\(M,N\)に対して\(\pi _n(M\times N)\)を計算してみよう。 \(S^n\)から\(M\times N\)への写像は、任意の \(\varphi _1:S^n\rightarrow M\)及び\(\varphi _2:S^n\rightarrow N\)を用いて、 \(\varphi _1\times \varphi _2:S^n\rightarrow M\times N\)を\(\varphi _1\)で\(S^n\)を\(M\)へ写し、 \(\varphi _2\)で\(S^n\)を\(N\)へ写す写像として全て表すことが出来る。 \(\varphi _1\simeq \phi _1\)かつ\(\varphi _2\simeq \phi _2\)であれば、 \(\varphi _1\times \varphi _2\simeq \phi _1\times \phi _2\)である。従って \(\pi _n(M\times N)\simeq \pi _n(M)\otimes \pi _n(N)\)である。 特に\(n\)次元トーラス
のホモトピー群は\(\pi _1(T^n)=\mathbb {Z}^n\)である。
ファイバー空間
ここから先の議論に必要な概念を定義する。多様体\(M\)及び位相空間\(E,F\)に対して \(p:E\rightarrow M\)を滑らかな(または連続な)全射とする。任意の\(x\in M\)に対して\(x\)の近傍 \(U\subset M\)と同相写像\(\varphi :U\times F\rightarrow p^{-1}(U)\)が存在し、 \(p\circ \varphi \)が自然な射影\(\pi :U\times F\rightarrow U\)に等しい時、 \((E,p,M,F)\)を局所自明ファイバー空間という。 ファイバー束は局所自明ファイバー空間の例である。 以下の内容に必要な例を出しておこう。
\(\mathbb {F}=\mathbb {R},\mathbb {C}\)に対して球面\(S^n_F\)から射影空間(付録「射影空間」参照) \(\mathbb {F}P^n\)への 等化写像\(p_F:S^n_F\rightarrow \mathbb {F}P^n\)に対して \((S^n_F,p_F,\mathbb {F}P^n,S^0_F)\)は局所自明なファイバー空間をなす。
相対ホモトピー群
定義 .10 基点付き多様体の対\((M,A,p)\)及び\((N,B,q)\)に対して、\(M\)から\(N\)への滑らかな射 \(\varphi :M\rightarrow N\)であり、\(\varphi (A)\subset B\)でかつ\(f(p)=q\)である時、 \(\varphi \)を基点付き多様体対の写像といい、
と書く。
定義 .11 一般に多様体\(M\)及び\(M\)の\(n-1\)個の部分多様体\(A_1\)、\(A_2\)、\(\cdots \)、\(A_{n-1}\)が\(A_{n-1} \subset \cdots \subset A_1\subset M\)である時、\((M,A_1,\cdots ,A_{n-1})\)を多様体の\(n\)対という。 2つの多様体の\(n\)対\((M,A_1,\cdots ,A_{n-1})\)及び、\((N,B_1,\cdots ,B_{n-1})\)に対して 滑らかな射\(\varphi :M\rightarrow N\)で、\(\varphi (A_i)\subset B_i\)を満たす時、\(\varphi \)を 多様体の\(n\)対の滑らかな写像といい、
と書く。基点付き多様体の対\((M,A,p)\)は\(p\)を\(1\)点からなる\(0\)次元部分多様体\(\{p\}\)と見なせば、 多様体の\(3\)対と考えることも出来る。
定義 .12 基点付き多様体の対\((M,A,p)\)及び\((N,B,q)\)に対し基点付き多様体対の写像 \(f,g:(M,A,p)\rightarrow (N,B,q)\)に対して滑らかな射
で、\(\varphi _{t_0}=f\)、\(\varphi _{t_1}=g\)でかつ\(\varphi _t(A)\subset B\)、\(\varphi _t(p)=q\) である時、\(f\)と\(g\)はホモトープであるといい、\(f\simeq g\)と書く。また \(\varphi \)をホモトピーという。基点付き多様体の対の間のホモトープの関係を考える 時には、常にこの意味におけるものとする。 また、基点付き多様体対の写像 全体をホモトープという同値関係で類別したものを\(\pi _0(M,A;N,B)\)と書き、これも ホモトピー集合という。
\(n\)次元球体\(D^n=\{x_1^2+\cdots +x_n^2\leq 1\}\)の基点を表面の\(S^{n-1}\)内に任意に1点選んだ時、 \(\pi _n(M,A,p):=\pi _0(D^n,S^{n-1};M,A)\)と置き、これもHurewiczのホモトピー集合 という。
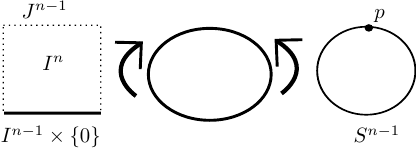
基点付き多様体の対\((M,A,p)\)及び \(I^n\)に対して\(J^{n-1}=\pd I^n\backslash (I^{n-1}\times \{0\})\)と置くとき、滑らかな射 \(\varphi :I^n\rightarrow M\)で\(\varphi (I^{n-1}\times \{0\})\subset A\)でかつ \(\varphi (J^{n-1})=\{p\}\) であるもの(即ち多様体の\(3\)対の写像\(\varphi :(I^n,\pd I^n,J^{n-1})\rightarrow (M,A,p)\)である) 全体を、この条件を満たすようなホモトピーによる同値類からなる集合を考えれば Hurewiczのホモトピー集合\(\pi _n(M,A,p)\)に等しい(下図)。
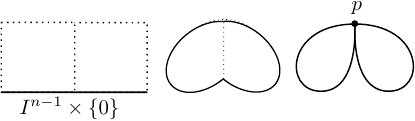
ホモトピー集合をこのように定義し直すのは、このようにして考えることにより \(\pi _n(M,p)\)同様に和を定義出来るからである。即ち\((n\geq 2)\)に対して \(\varphi _1,\varphi _2:(I^n,\pd I^n,J^{n-1})\rightarrow (M,A,p)\)に対して
として定義される(下図)。
この場合も\(\varphi _1\simeq \phi _1\)かつ\(\varphi _2\simeq \phi _2\)であれば、 \(\varphi _1+\varphi _2\simeq \phi _1+\phi _2\)である。従って\(\pi _n(M,A,p)\)に対して 自然に和を定義出来る。\(\pi _n(M,p)\)の場合同様に、\(\pi _n(M,A,p)\)はこの和に対して群をなす。 単位元は基点を保つ写像\(D^n\rightarrow A\)のホモトピー類である。\(D^n\)の可縮性より これは定値写像のホモトピー類である。 逆元は\(\varphi (t_1,\cdots ,t_{n-1},t_n)\)のホモトピー 類に対して\(\varphi (t_1,\cdots ,1-t_{n-1},t_n)\)のホモトピー類が対応する。 \(\pi _n(M,A,p)\)を相対ホモトピー群という。
\(n\geq 3\)に対しては\(\pi _n(M,A,p)\)は可換群となる。可換性は\(\pi _n(M,p)\)の可換性と 同様に考えれば理解出来る。
多様体\(M\)が連結でれば、ホモトピー群と同様に基点の選び方によらない。 そのような場合には\(\pi _n(M,A)\)と書く。
ホモトピー完全系列
コホモロジーと同様にホモトピー群においても完全系列を与えることが出来る。 この節ではホモトピー群の完全系列を導入する。 そのためにまず必要な定義を行う。
定義 .13 \([\varphi ]\in \pi _n(M,A,p)\)に対し、\(I^{n-1}\times \{0\}\)と\(I^{n-1}\)を同一視すれば、 \(\pd \varphi :=\varphi |_{I^{n-1}\times \{0\}}:(I^{n-1},\pd I^{n-1})\rightarrow (A,p)\) は\(S^{n-1}\)から\(A\)への基点を保つ写像を定義する。\(\pd \)のホモトピー群への誘導として、準同型 \(\pd :\pi _n(M,A,p)\rightarrow \pi _{n-1}(A,p)\)が得られる。
定理 .2 包含写像\(i:A\subset M\)及び\(j:(M,p,p)\rightarrow (M,A,p)\)に対して、それらのホモトピー群 への誘導を\(i_*\)、\(j_*\)とする55
。この時
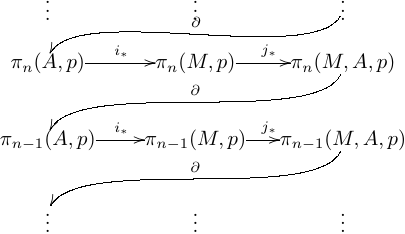
は完全系列である。これを多様体対のホモトピー完全系列という。
\(\mathrm {Im}i_*=\mathrm {Ker}j_*\)については、\(\mathrm {Im}i_*\subset \mathrm {Ker}j_*\)は \(\pi _n(M,A,p)\)の単位元の定義から明らか であると思う。\([\varphi ]\in \mathrm {Ker}j_*\)とすれば、\(j_*\varphi \)は\(\overset {\circ }{I^n}\) (\(I^n\)の内点)と\(I^{n-1}\times \{0\}\)を\(A\)に写し、\(J^{n-1}\)を\(p\)へ写す写像に変形できる。 そこでそのような ホモトピーの\(I^{n-1}\times \{0\}\)への制限を考えれば、ちょうど基点を保つ写像 \(I^n\simeq D^n\rightarrow A\)が得られるのが分かる。これと\(\overset {\circ }{I^n}\)の\(A\)への写像とを あわせれば\(S^n\rightarrow A\)が得られるのが分かる。 従って\(\mathrm {Im}i_*\supset \mathrm {Ker}j_*\) である。\(\mathrm {Im}j_*=\mathrm {Ker}\pd \) は\(\pi _n(M,A,p)\)の単位元の定義から明らかであろう。 \(\mathrm {Im}\pd =\mathrm {Ker}i_*\)について証明しよう。\(\mathrm {Im}\pd \subset \mathrm {Ker}i_*\) については、\([\varphi ]\in \pi _n(M,A,p)\)に対して、\(\varphi :(D^n,S^{n-1}) \rightarrow (M,A)\)の\(S^{n-1}\)への制限\(\pd \varphi \)のホモトピー類が\(\pd \)の像であるが、 \(D^n\)の中を伝って\(S^{n-1}\)を\(1\)点\(p\)に縮めることが出来るので、\(i_*\)の核に属することが 分かる。逆に\([\varphi ]\in \pi _{n-1}(A,p)\)が\(i_*\)の核であれば、\(\varphi \)と定値写像とを 繋ぐホモトピーがそのまま\(\pd \)の原像になる。
次にファイバー空間に対してホモトピー完全系列を定義する。まず準備から。
補題 .3 ファイバー空間\((E,p,M,F)\)に対し\(M\)の基点を\(x_0\)とする。\(x_1\in E\)で\(p(x_1)=x_0\)である とする。また\(p^{-1}(x_0)\simeq F\)により\(p^{-1}(x_0)\)と\(F\)を同一視する。この時
これを証明するには射入\(i:F\simeq p^{-1}(x_0)\subset E\)に対し
短完全系列であることを用いる(即ち\(\mathrm {Im}i_*=\mathrm {Ker}p_*\)である。証明はほぼ明らか であると思う)。\(\mathrm {Im}i_*=\{[0]\}\)であることを示せばよい。しかしこれは 前節の相対ホモトピー群の単位元の定義により自明である。
定理 .3 ファイバー空間\((E,p,M,F)\)に対し、基点を上記の通りにとるとする。
と置けば
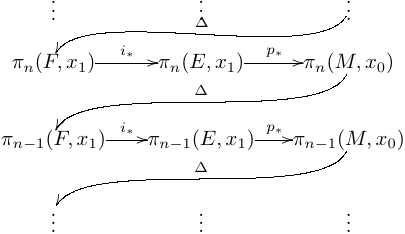
は完全系列である。これをファイバー空間のホモトピー完全系列という。
証明は上記多様体対のホモトピー完全系列、及び\(p_*\)の全単射性を用いれば明らかであると思う。
ファイバー空間\((S^3,p,\mathbb {C}P^1,S^1)\)に対してホモトピー完全系列を計算することにより \(\mathbb {C}P^1\simeq S^2\)に注意すれば\(\pi _2(S^2)=\mathbb {Z}\)、及び\(\pi _n(S^2)\simeq \pi _n(S^3)\ (n\geq 3)\)などが得られる。
懸垂準同型
定義 .14 多様体\(M\)に対し、\(M\times I\)の\(M\times \{0\}\)及び、\(M\times \{1\}\)をそれぞれ\(1\)点に縮めた ものを\(\Sigma M\)と書き、\(M\)の懸垂と呼ぶ。
例えば\(S^n=\{x_1^2+\cdots +x_{n+1}^2=1\}\)の\(x_{n+1}=一定\)の領域は\(S^{n-1}\)と同型である。 従って\(\Sigma S^{n-1}\simeq S^n\) である。
定義 .15 滑らかな写像\(\varphi :M\rightarrow N\)に対し、\(\varphi \times 1:M\times I\rightarrow N\times I\) は自然に滑らかな写像\(\Sigma \varphi :\Sigma M\rightarrow \Sigma N\)を誘導する。 これを\(\varphi \)の懸垂と呼ぶ。
\(\Sigma \)のホモトピー群への誘導\(\Sigma _*:\pi _n(M)\rightarrow \pi _{n+1}(\Sigma M)\)は 準同型であることは容易に分かると思う。これを懸垂準同型という。
定義 .16 懸垂準同型\(\Sigma _*:\pi _{n-1}(S^{n-1})\rightarrow \pi _n(S^n)\)は\(n=2\)の時全射、 \(n\geq 3\)の時同型写像である。これをFreudenthalの懸垂定理(の特殊な場合) という。
\(n\geq 2\)の時に全射性を証明しよう。任意の\(\varphi :S^n\rightarrow S^n\)に対し、 \(\varphi (S^n)\)は\(\varphi \)とホモトープな写像と置き換えることにより、\(n\)次元部分多様体と 見なしてよい。さらに\(\varphi (S^n)\)は北極\(q_n\)と南極\(q_s\)を含み、それらが正則値 (正則値の定義は”トポロジー”noteを参照)である仮定してもよい。 従って\(\varphi ^{-1}(q_n)\)及び\(\varphi ^{-1}(q_s)\)はそれぞれ有限集合である。 まず\(S^n\)を変形することにより、\(\varphi ^{-1}(q_n)\)内の点を全てを北極に集めて \(1\)点にしてしまう。 同様に\(\varphi ^{-1}(q_s)\)も\(1\)点に集めて南極に集める。 そのような対応を改めて\(\varphi \)と書くことにする。 終域の北極と南極と区別するために、定義域の北極と南極をそれぞれ\(p_n\)、\(p_s\)とする。 次に\(S^n\)に対して南極に\(x_{n+1}=-1\)を北極に\(x_{n+1}=1\)を対応させるように座標系を とる。定義域の\(S^n\)に対し、南極から北極までの道で\(x_{n+1}\)が単調増加するような道を \(l\)とする。任意のこのような道\(l\)に対して、 \(\varphi \circ l\)が同様に\(x_{n+1}\)が単調増加するように\(\varphi \)を変形する。 さらに定義域の\(x_{n+1}\)と終域の\(x_{n+1}\)が等しくなるように\(\varphi \)を変形すれば、 \(x_{n+1}=一定\)の断面は\(\phi :S^{n-1}\rightarrow S^{n-1}\)を与えており、\(\varphi =\Sigma \phi \) である。従って全射である。
\(n\geq 3\)の時、単射性を証明する。 \(\varphi _1:S^{n-1}\rightarrow S^{n-1}\)及び\(\varphi _2:S^{n-1}\rightarrow S^{n-1}\)に対し、 懸垂\(\Sigma \varphi _1\)と\(\Sigma \varphi _2\)がホモトープであるとする。 この時ホモトピー\(F:I\times S^n\rightarrow S^n\)、 \(F_0=\Sigma \varphi _1\)、\(F_1=\Sigma \varphi _2\)であり、任意の\(t\in I\)に対して \(F_t\)が\(S^{n-1}\rightarrow S^{n-1}\)の懸垂であるものが存在すればよい。 \(F\)の終域の北極\(q_n\)と南極\(q_s\)を上記と同じように正則点にとれば、 それらの逆像はそれぞれ\(1\)次元多様体である。\(F^{-1}(q_n)\)の端点は\((0,p_n)\)及び\((1,p_n)\)に あり、\(F^{-1}(q_s)\)の端点は\((0,p_s)\)及び\((1,p_s)\)にある。 \(I\times S^n\)の部分集合\(U\)で\(I^{n+1}\)に同相であるものが取れる。さらに \(U\)は\(F^{-1}(q_n)\)と\(F^{-1}(q_s)\)の端点を含むようなものとする。 \(F^{-1}(q_n)\)と\(F^{-1}(q_s)\)を\(U\)内に集める。\(n\geq 3\)なので Whitneyの定理により、次元が\(1\)次元の多様体\(F^{-1}(q_n)\)及び\(F^{-1}(q_s)\)を \(I^n\)と同相な、\(U\)の部分集合\(V\)(\(V\)も\(F^{-1}(q_n)\)と\(F^{-1}(q_s)\)の端点を含む ようにとる。以下では\(V\)と\(I^n\)を同一視する) の中に押し込めることが出来る。さらに \(F^{-1}(q_n)\)(の端点の近傍を除き)を \(\{0\}\times I^n\)の中に、\(F^{-1}(q_s)\)(の端点の近傍を除き)を \(\{1\}\times I^n\)の中に来るように 変形出来る77
。後は\(F^{-1}(q_n)\)を\(I\times \{p_n\}\)に、\(F^{-1}(q_s)\)を\(I\times \{p_s\}\)に
集める。上述と同じ議論を用いれば、 自然に\(\varphi _1\)と\(\varphi _2\)のホモトピーが得られる。従って単射である。
懸垂定理及び\(\pi _2(S^2)=\mathbb {Z}\)より、 一般に\(\pi _n(S^n)=\mathbb {Z}\)が得られる。
最後に\(SU(n)\)のホモトピー群をいくつか計算しよう。 同型\(S^{2n-1}\simeq U(n)/U(n-1)=SU(n)/SU(n-1)\)より88
、 ファイバー空間 \((SU(n),p,S^{2n-1},SU(n-1))\)が定義出来る。 これにホモトピー完全系列を適用する。 まず\(n=3\)の時、
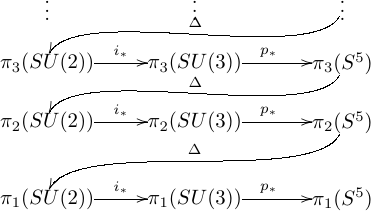
の完全系列を得る。 従って\(\pi _2(SU(2))\simeq \pi _2(SU(3))\)及び\(\pi _3(SU(2))\simeq \pi _3(SU(3))\) が得られる。同様にして\(n\geq 3\)において \(\pi _2(SU(n-1))\simeq \pi _2(SU(n))\)及び\(\pi _3(SU(n-1))\simeq \pi _3(SU(n))\) が分かる。 \(SU(1)=1点\)に注意すれば\(SU(2)\simeq S^3\)である。 従って\(\pi _2(SU(2))=0\)及び\(\pi _3(SU(2))=\mathbb {Z}\)より、\(n\geq 2\)の時
を得る。
多様体の連結性
”トポロジー”noteで脚注において連結であることの定義を述べていた。即ち\(M\)の任意の2点\(a\)、\(b\) に対して道\(l:I\rightarrow M\)で\(l(0)=a\)、\(l(1)=b\)なるものが存在する時、\(M\)を連結と呼ぶと 定義しておいた。正確にはこの条件を満たす位相空間は弧状連結であると呼ばれる。 通常、\(M\)の開集合\(U,V\)が\(U\cup V=M\)かつ\(U\cap V=\emptyset \)となる時に不連結 であると呼ばれ、 そうでない時連結であると呼ばれる。多様体においてはこれらの条件は同値である。 それを以下で示しておこう。
まず\(M\)の任意の点\(p\)に対して\(p\)と弧状連結な領域を\(U_p\)と置こう。この時\(U_p\)内の任意の点 \(a\)に対して、\(a\)のある開近傍で\(U_p\)に含まれていて、\(\mathbb {R}^n\)と同相なものが存在する。 従って明らかにその領域内の任意の点と\(a\)を結ぶ道が存在する。従って\(U_p\)は開集合である。 \(M\)が弧状連結、即ち\(U_p=M\)であれば\(M\)は連結であるのが分かる。 なぜなら不連結であるとするならば、交わらない開集合\(U,V\)が\(M\)の開被覆となるが、\(U\)内の点と \(V\)内の点を結ぶ道\(l\)に対して、\(l(0)\in U,\ l(1)\in V\)とすると、
と置けば\(l(t_0)\)を含むほうが開集合でないことになるからである。 一方、\(U_p\neq M\)であるならば \(q\nin U_p\)に対して同じように\(U_q\)を定義する。この時\(U_p\cap U_q=\emptyset \)である。 そうでなければ\(a\in U_p\cap U_q\)は\(p\)とも\(q\)とも繋げられることになり仮定に矛盾する。 このようにして互いに排他的な開被覆\(\{U_p,U_q,\cdots \}\)が得られる。従って\(M\)は不連結 であることになる。
以上で示したいことが示された。
位相変換群
群\(G\)が\(G\)が次の条件を満たす時、位相群という。
1) \(G\)は群でもあり位相空間でもある。
2) 次の2つの写像
が共に連続である。
3) \(G\)はハウスドルフ空間である。位相空間\(G\)がハウスドルフ空間であるとは \(g_1,g_2\in G\)に対して、ある開集合\(U,V\) が存在し、\(g_1\in U,\ g_2\in V\)かつ\(U\cap V=\emptyset \)と出来ることをいう。
1) \(G\)の単位元\(1\)に対して、\(1\cdot p=p\)
2) \(G\)の2つの元\(g_1,g_2\)に対して\(g_1\cdot (g_2\cdot p)=(g_1g_2)\cdot p\) を満たす時、\(G\)を\(M\)上の(左)位相変換群と呼ぶ。
定義 .18 \(M\)の任意の2点\(p_1,p_2\)に対して\(p_2=g\cdot p_1\)なる\(g\in G\)が存在する時、 \(G\)を推移的であるという(”トポロジー”noteでも定義している)。
は\(G\)の部分群である。これを\(G\)の等方部分群という。
補題 .4 多様体\(M\)上のコンパクトな推移的左位相変換群\(G\)と\(M\)上の1点\(p_0\)が与えられた時、 連続写像\(p_0:G\rightarrow M\)を
で定義すれば、\(p_0\)は連続な全単射\(h_0:G/G_0\rightarrow M\)を誘導する。 これは\(M\)のハウスドルフ性と\(G\)のコンパクト性により同相写像である。 即ち\(M\simeq G/G_0\)である1010
一般にコンパクト空間\(X\)からハウスドルフ空間\(Y\)への連続な全単射が与えられれば、 \(X\)と\(Y\)は同相であることが示される。 証明はだいたいの位相空間の基本的な参考書には載っていると思う。
以下の議論において必要な定義を与えておく。 \(\mathbb {F}=\mathbb {R}\)または\(\mathbb {C}\)とする。単位球面を
で定義する。具体的に書けば\(S^n_R=S^n\)及び\(S^n_C=S^{2n+1}\)である。
例1) \(S^{n-1}=\{x_1^2+\cdots +x_n^2=1\}\)に対し、\(\mathrm {O}(n)\)はコンパクトで 推移的な位相変換群である。特に任意の\(\v {x}\in S^{n-1}\)に対して、\(\v {x}\)周りの回転は \(\mathrm {O}(n-1)\)に等しい。即ち\(\mathrm {O}(n-1)\)は等方部分群でるある。従って \(S^{n-1}\simeq \mathrm {O}(n)/\mathrm {O}(n-1)\)である。
例2) \(S^{n-1}_C=S^{2n-1}=\{|z_1|^2+\cdots +|z_n|^2=1\}\)に対して、\(U(n)\)はコンパクトで 推移的な位相変換群である。\(\v {z}\in S^{n-1}_C\)に対して\(\v {z}\)周りの回転 \(U(n-1)\)が等方部分群となるので、\(S^{2n-1}\simeq U(n)/U(n-1)\)である。
定義 .20 多様体\(M\)上の位相変換群\(G\)に対して、\(p_1,p_2\in M\)が\(p_2=g\cdot p_1\ (g\in G)\)である時 同値であると定義した等化空間を\(M/G\)で表し、\(M\)の\(G\)による軌道空間という。
射影空間
\(\mathbb {F}=\mathbb {R}\)または\(\mathbb {C}\)とする。この時\(\mathbb {F}^{n+1}\)から原点\(0\) を除いた部分空間\(\mathbb {F}^{n+1}\backslash \{0\}\)において\(2\)点\(\v {z}=(z_0,\cdots ,z_n)\)と \(\v {w}=(w_0,\cdots ,w_n)\)が\(\v {w}=a\v {z}\)なる\(a\in \mathbb {F}\backslash \{0\}\) が存在する時同値であるとして得られる 等化空間を\(\mathbb {F}P^n\)と書き、\(\mathbb {F}\)の\(n\)次元射影空間という。 \((z_0,z_1)\)の同値類を\([z_0,z_1]\)と書くことにする。
\(\mathbb {F}P^1\)と、\(\mathbb {F}\)に無限遠点\(\infty \)を加えて\(1\)点コンパクト化した \(\mathbb {F}\cup \{\infty \}\)との間の対応を、 \([z_0,z_1]\in \mathbb {F}P^1\)に対して\(z_1\neq 0\)であれば\(z_0/z_1\in \mathbb {F}\)に対応させ、 \(z_1=0\)であれば\(\infty \)に対応するとした時、この対応は同型写像となる。 即ち\(\mathbb {F}P^1\simeq \mathbb {F}\cup \{\infty \}\)である。具体的に書けば、 \(\mathbb {R}\cup \{\infty \}\simeq S^1\)及び\(\mathbb {C}\cup \{\infty \}\simeq S^2\)である。
その他の同型を求めてみよう。 射影空間の定義において\(\mathbb {F}^{n+1}\backslash \{0\}\) ではなく、\(S^n_F\)から上記の同値関係によっても\(\mathbb {F}P^n\)が得られる。 さて定義により\(\v {z},\v {w}\in S^n_F\)に対して\(a\in \mathbb {F}\)が存在し、\(\v {w}=a\v {z}\) であれば同値である。ここで\(a\)は\(|a|^2=1\)である。従って射影空間\(\mathbb {F}P^n\)は \(S^n_F\)の\(S^0_F\)による軌道空間である。即ち\(\mathbb {F}P^n\simeq S^n_F/S^0_F\) である。
このサイトの管理人のTKGです。
いくつか昔頑張って作った自作のテキストPDFをサンプルとして投稿しています。
みなさんご自由にお気軽にノートを投稿してください!
ノートは結構昔に書いていて文章をやや硬くかいていますが、ちょっとテキストを意識しすぎていました。あしからずです。