\(% 自動抽出されたマクロ定義
% 元ファイル: 解析力学.tex
% 生成日時: 2026-02-16 21:25:44
% MathJax用の標準コマンド定義
\def\slash{/\mkern-5mu}
\def\v#1{{\bf #1}}
\def\d{\mathrm{d}}
\def\pd{\partial}
\def\vf#1{\bar{\bf #1}}
\def\t#1{\tilde{#1}}
\def\ttheta{\t{\theta}}
\def\tomega{\t{\omega}}
\def\w{\wedge}
\def\tt{\ttheta}
\def\to{\tomega}
\def\dq#1{\d q^{#1}}
\def\pq#1{\frac{\pd}{\pd q^{#1}}}
\def\tv#1{\tilde{{\bf #1}}}
\def\vov#1{\stackrel{#1}{\vee}}
\def\nabsla{\nabla\!\!\!\!\slash}
\def\delsla{\pd\!\!\!\slash}
\def\sla#1{#1\!\!\!\slash}
\def\diffop#1{\frac{\d}{\d #1}}
\def\diffopn#1#2{\frac{\d^#1}{\d #2^#1}}
\def\diff#1#2{\frac{\d #1}{\d #2}}
\def\diffn#1#2#3{\frac{\d^#1 #2}{\d #3^#1}}
\def\pdiffop#1{\frac{\pd}{\pd #1}}
\def\pdiffopn#1#2{\frac{\pd^#1}{\pd #2^#1}}
\def\pdiff#1#2{\frac{\pd #1}{\pd #2}}
\def\pdiffn#1#2#3{\frac{\pd^#1 #2}{\pd #3^#1}}
\def\cdiffop#1{\frac{d}{d #1}}
\def\cdiffopn#1#2{\frac{d^#1}{d #2^#1}}
\def\cdiff#1#2{\frac{d #1}{d #2}}
\def\cdiffn#1#2#3{\frac{d^#1 #2}{d #3^#1}}
\)
INTRODUCTION
ここでは幾何の話noteの内容までは理解出来ているものと仮定する。 最初にまずニュートン力学の復習から始め、ラグランジアン形式を説明し、正準形式 の説明し、最後にハミルトン・ヤコビ理論を説明する。
ニュートン力学
物体が運動している時、 物体の軌道を時間\(t\)の関数(ベクトル値)として\(\v {x}(t)\)で表す。この時 、\(\v {x}(t)\)の時間 変化率、即ち時間微分\(\v {v}=\frac {d\v {x}}{dt}(t)\)を速度、さらに時間の二階微分 \(\v {a}=\frac {d^2\v {x}}{dt^2}(t)\)を加速度といった。物体の質量を\(m\)とした時、 物体に働く力\(\v {F}\)を
\begin{eqnarray} m\frac {d^2\v {x}}{dt^2}(t)=\v {F}(t) \end{eqnarray}
で定義した。この方程式をニュートンの運動方程式と呼んだのだった。 或いは逆に力が先に定義されて、加速度と力の関係を与えるのがニュートンの運動方程式と解釈 してもよい。 この式から慣性の法則が読み取れる。即ち物体に力が働いてなければ、物体の加速度 は常に\(0\)である。言い換えれば等速直線運動をする。 ただし肝心の座標系自体が運動しているような場合にはこの限りではない。 静止している物体も運動している座標系から見たら運動しているように見えることになる。 従って、慣性の法則が成り立つ座標系を慣性系といい、運動する座標系などと区別することにする。 最後に物体同士に働く力(相互作用)について。物体同士が力を及ぼしあっている時、一方の物体に 働く力が\(\v {F}\)であれば、もう一方の物体には力\(-\v {F}\)が働く。
以上を3つの原理としてまとめれば
1) 慣性の法則
全ての物体はそれに加えられた力によって状態が変化させられない限り、静止あるいは等速 直線運動をする。
2) 運動方程式
運動量の変化は加えられた力に比例し、かつその力が働いた直線方向に沿って起こる。
3) 作用・反作用の法則
全ての作用に対して、大きさが等しく反対向きの反作用が存在する。
ここに運動量とは\(\v {p}=m\v {v}\)で定義される量である。
作用反作用の法則について簡単な例を出してみると、例えば質量\(m\)の物体が一列に\(n\)個並んで いる場合を考える。一番右側から力を加えて全ての物体が連なって動くようにするには、 まず一番左端の物体に左方向への力\(F\)が加わっているとする。加速度を\(a\)とすると運動方程式 より\(ma=F\)の関係がある。つまり\(a=\frac {F}{m}\)である。作用反作用の法則より、 左から二番目の物体には右方向へ力\(F\)が加わる。従って二番目の物体を同じ加速度\(a\)で動かす ためには左方向へ力\(2F\)を加えていることになる。同様に三番目の物体には右方向へ\(2F\)の力 が加えられるので、加速度\(a\)で運動させるには左方向へ\(3F\)の力を加えていることになる(下図)。
\begin{align} \end{align}
このようにして、一番右側の物体には左方向へ力\(nF\)を加えていることになるのが分かる。 こうして一番右側 から力を加えている人は全部で質量\(nm\)のものを力\(nF\)を加えて、加速度\(a\)で動かしている という直感的に当たり前の事実が導かれる。
エネルギー保存則
物体が力\(\v {F}\)を受けて運動している時、物体の軌跡\(C\)に沿った積分
\begin{eqnarray} W=\int _C\v {F}d\v {x} \end{eqnarray}
を仕事という。ここで曲線\(C\)の始点を\(A\)、終点を\(B\)と置き、ニュートンの運動方程式を用いると
\begin{eqnarray} W&=&\int _A^B\v {F}d\v {x} \nonumber \\ &=&\int _A^B m\frac {d^2\v {x}}{dt^2}d\v {x} \nonumber \\ &=&\int _{t_A}^{t_B} m\frac {d^2\v {x}}{dt^2}\frac {d\v {x}}{dt}dt \nonumber \\ &=&\int _{t_A}^{t_B}\frac {m}{2}\frac {d\v {v}^2}{dt}dt \nonumber \\ &=&\frac {1}{2}m\v {v}_B^2-\frac {1}{2}m\v {v}_A^2 \label {dW} \end{eqnarray}
となる。ここで\(T=\frac {1}{2}m\v {v}^2\)は運動エネルギーと呼ばれる。即ち運動エネルギーの 変化量は与えられた仕事に等しい。ここで物理でよくあることであるが、力\(\v {F}\)が ある関数\(V(\v {x})\)の微分で
\begin{eqnarray} \v {F}=-\frac {\pd V}{\pd \v {x}}(\v {x}) \end{eqnarray}
と与えられている場合には、(4)より
\begin{eqnarray} E:=\frac {1}{2}m\v {v}^2+V(\v {x}) \end{eqnarray}
が運動の間常に一定であることが分かる。言い換えれば\(E\)は保存量である。 この時\(E\)をエネルギー、\(V\)をポテンシャルエネルギーと呼ぶ。 力\(\v {F}\)がこのように与えられる時、\(\v {F}\)を保存力と呼ぶ。またこの場合のエネルギーが保存 することをエネルギー保存の法則とも呼ぶ。このような保存則については詳しく後述する。
運動量保存則
物体が\(N\)個存在し、それら物体同士が互いに他の物体に力を及ぼしあっている場合を考える。 物体に番号を振っていき、\(i\)番目の物体の質量を\(m_i\)、位置ベクトルを\(\v {x}_i\)、などと 物理量に番号を振る。この時運動方程式は
\begin{eqnarray} \frac {d\v {p}_i}{dt}=\v {F}_i+\sum _{j=1}^N\v {F}_{ij} \end{eqnarray}
で与えられる。ここで\(\v {F}_i\)は\(i\)番目の物体に働く外力で、\(\v {F}_{ij}\)は\(j\)番目の物体が \(i\)番目の物体に及ぼす力である。また\(\v {F}_{ii}=0\)とする。
さて作用・反作用の法則より\(\v {F}_{ij}=-\v {F}_{ji}\)であるので、上の方程式をすべての\(i\) に対して和を取ると(運動量の総和を\(\v {P}\)と書けば)
\begin{eqnarray} \frac {d\v {P}}{dt}&=&\sum _i\frac {d\v {p}_i}{dt} \nonumber \\ &=&\sum _i\v {F}_i+\sum _{ij}\v {F}_{ij} \nonumber \\ &=&\sum _i\v {F}_i \end{eqnarray}
となる。従って各物体に外力が働いていない場合には\(\sum _i\v {F}_i=0\)であるので、 運動量の総和は時間とともに変化しないことになる。これを運動量の保存則という。
角運動量保存則
角運動量を位置ベクトルと運動量との外積
\begin{eqnarray} \v {L}=\v {x}\times \v {p} \end{eqnarray}
で定義する。角運動量の時間変化(\(\v {p}=m\v {v}\)に注意して)
\begin{eqnarray} \frac {d\v {L}}{dt}=\v {x}\times \v {F} \end{eqnarray}
を\(\v {N}\)と書き、トルク(力のモーメント)と呼ぶ。従って力が位置ベクトル\(\v {x}\)に平行 であれば、トルクは\(0\)となる。即ち角運動量の時間変化は\(0\)である。これを 角運動量の保存則という。
剛体の運動
これまでは点状の物体の運動についてであった。 ここでは剛体の運動の説明。剛体とは広がりを持った、変形しない物体のことである。
相対座標系
剛体の占める領域を\(D_t\)で表す (剛体は運動しているのでこの領域は時間とともに変わっていく。従って \(D_t\)のように時間に依存する形で書くべきである)。 剛体の質量密度を\(\rho \)とする。剛体全体の質量を\(m\)と置く。 この時、剛体内の任意の点を\(\v {x}\)で表し、その点の動く速度を\(\v {v}\)とすれば 角運動量は
\begin{eqnarray} \v {L}=\int _{D_t}\rho \v {x}\times \v {v}dV \end{eqnarray}
で表される。重心座標は
\begin{eqnarray} \v {x}_G=\frac {\int _{D_t}\rho \v {x}dV}{\int _{D_t}\rho dV}=\frac {\int _{D_t}\rho \v {x}dV}{m} \end{eqnarray}
と書ける。重心座標系を原点とした座標系(重心系)を取ったときには、
\begin{eqnarray} \v {s}:=\v {x}-\v {x}_G \end{eqnarray}
が重心系での座標となる。これを相対座標という。これを用いて \(\int _{D_t}\rho \v {s}dV=0\)に注意すれば角運動量は
\begin{eqnarray} \v {L}&=&\int _{D_t}\rho (\v {s}+\v {x}_G)\times (\dot {\v {s}}+\dot {\v {x}_G})dV \nonumber \\ &=&\int _{D_t}\rho \v {s}\times \dot {\v {s}}dV+\int _{D_t}\rho \v {s}dV\times \dot {\v {x}_G} +\v {x}_G\times \int _{D_t}\rho \dot {\v {s}}dV+\int _{D_t}\rho dV\v {x}_G\times \dot {\v {x}}_G \nonumber \\ &=&\int _{D_t}\rho \v {s}\times \dot {\v {s}}dV+m\v {x}_G\times \dot {\v {x}}_G \nonumber \\ &=&\v {L}_s+\v {L}_G \end{eqnarray}
となる。第一項目は相対座標系での角運動量。第二項目は重心の角運動量。
運動方程式
剛体に加わる力の合力を\(\v {F}_G\)とすると、剛体全体の運動方程式は
\begin{eqnarray} \frac {d}{dt}\int _{D_t}\rho \v {v}dV&=&\int _{D_t}\rho \dot {\v {v}}dV \nonumber \\ &=&\int _{D_t}\rho (\ddot {\v {s}}+\ddot {\v {x}}_G)dV \nonumber \\ &=&\int _{D_t}\rho dV\cdot \ddot {\v {x}}_G \nonumber \\ &=&m\ddot {\v {x}}_G \nonumber \\ &=&\v {F}_G \end{eqnarray}
ここで最初の等号は連続の方程式
\begin{eqnarray} \frac {d}{dt}\int _{D_t}\rho dV=0 \end{eqnarray}
を用いている(詳しくは”幾何のお話”note参照)。
運動エネルギー
剛体の運動エネルギーは
\begin{eqnarray} T=\int _{D_t}\frac {\rho }{2}\v {v}^2dV \end{eqnarray}
ここで重心系と相対座標系とに分ければ
\begin{eqnarray} \v {v}^2&=&(\dot {\v {s}}+\dot {\v {x}}_G)^2 \nonumber \\ &=&\dot {\v {s}}^2+\dot {\v {x}}^2_G+2\dot {\v {s}}\cdot \dot {\v {x}}_G \end{eqnarray}
従って\(\int _{D_t}\rho \v {s}dV=0\)より
\begin{eqnarray} T&=&\int _{D_t}\frac {\rho }{2}\dot {\v {s}}^2dV+\int _{D_t}\frac {\rho }{2}\dot {\v {x}}_G^2dV \nonumber \\ &=&T_s+T_G \end{eqnarray}
ここで\(T_s\)は相対座標系から見た剛体の運動エネルギー。\(T_G\)は重心系の運動エネルギーである。 即ち剛体の運動エネルギーは重心系と相対座標系とに分けることが出来る。
慣性モーメント
角運動量\(\v {L}\)は
\begin{eqnarray} \v {L}=\int _{D_t}\rho \v {x}\times \dot {\v {x}}dV \end{eqnarray}
で表された。この時間微分(トルク)は
\begin{eqnarray} \v {N}&:=&\frac {d}{dt}\v {L} \nonumber \\ &=&\int _{D_t}\rho \v {x}\times \ddot {\v {x}}dV \nonumber \\ &=&\int _{D_t}\v {x}\times \v {F}dV \end{eqnarray}
ここで\(\v {F}\)は剛体の各点\(\v {x}\)に働く外力である。
ここで剛体が角運動量\(\v {w}\)で回転している場合を考える。 この時、剛体内の任意の点\(\v {x}\)の速度は
\begin{eqnarray} \dot {\v {x}}=\v {w}\times \v {x} \end{eqnarray}
で表される。従って角運動量\(\v {L}\)は
\begin{eqnarray} \v {L}=\int _{D_t}\rho \v {x}\times (\v {w}\times \v {x})dV \end{eqnarray}
ここで一般に3次元ベクトル\(\v {a}\)、\(\v {b}\)、\(\v {c}\)に対して
\begin{eqnarray} \v {a}\times (\v {b}\times \v {c}) \end{eqnarray}
を計算する。単位ベクトル(正規直交基底)を\(\v {e}_i\ \ (i=1,2,3)\)で表せば
\begin{eqnarray} \v {b}\times \v {c}=\varepsilon _{ijk}\v {e}_ib_jc_k \end{eqnarray}
と書けるので
\begin{eqnarray} \v {a}\times (\v {b}\times \v {c})&=&\varepsilon _{ijk}\v {e}_ia_j\varepsilon _{klm}b_lc_m \nonumber \\ &=&\underbrace {\varepsilon _{kij}\varepsilon _{klm}}_{=\delta _{il}\delta _{jm} -\delta _{im}\delta _{jl}}\v {e}_ia_jb^lc_m \nonumber \\ &=&\v {b}\cdot (\v {a}\cdot \v {c})-\v {c}\cdot (\v {a}\cdot \v {b}) \end{eqnarray}
従って
\begin{eqnarray} \v {L}&=&\int _{D_t}\rho (\v {w}|\v {x}|^2-\v {x}(\v {x}\cdot \v {w})) \nonumber \\ &=&\int _{D_t}\rho |\v {x}|^2(\v {w}-\frac {\v {x}}{|\v {x}|^2}(\v {x}\cdot \v {w})) \nonumber \\ &=&\int _{D_t}\rho \left ( \begin {array}{c} w_1(y^2+z^2)-w_2xy-w_3xz\\ -w_1xy+w_2(x^2+z^2)-w_3yz\\ -w_1xz-w_2yz+w_3(x^2+y^2)\\ \end {array} \right )dV \nonumber \\ &=&\underbrace {\int _{D_t}\rho \left ( \begin {array}{ccc} y^2+z^2 & -xy &-xz \\ -xy & x^2+z^2 & -yz \\ -xz & -yz & x^2+y^2\\ \end {array} \right )dV}_{=:\hat {I}}\cdot \v {w} \nonumber \\ &=&\hat {I}\cdot \v {w} \end{eqnarray}
ここで定義した\(\hat {I}\)の対角成分を慣性モーメントといい、その他の成分を慣性乗積という。 また\(\hat {I}\)を慣性モーメントテンソルという。
回転する剛体の運動
回転する剛体の各点の速度は\(\v {v}=\v {w}\times \v {x}\)と書ける。従って運動エネルギーは
\begin{eqnarray} T&=&\int _{D_t}\frac {\rho }{2}\v {v}^2dV \nonumber \\ &=&\int _{D_t}\frac {\rho }{2}\v {v}\cdot (\v {w}\times \v {x})dV \end{eqnarray}
ここで一般に
\begin{eqnarray} \v {a}\cdot (\v {b}\times \v {c})&=&\varepsilon _{ijk}a_ib_jc_k \nonumber \\ &=&-\varepsilon _{jik}b_ja_ic_k \nonumber \\ &=&-\v {b}\cdot (\v {a}\times \v {c}) \end{eqnarray}
となるので
\begin{eqnarray} T&=&\int _{D_t}\frac {\rho }{2}(\v {x}\times \v {v})\cdot \v {w} \nonumber \\ &=&\frac {1}{2}\v {L}\cdot \v {w} \end{eqnarray}
前節より慣性モーメントを用いて角運動量を表せば\(\v {L}=\hat {I}\cdot \v {w}\)より
\begin{eqnarray} T&=&\frac {1}{2}(\hat {I}\v {w}\cdot \v {w}) \nonumber \\ &=&\frac {1}{2}\v {w}^t\hat {I}\v {w} \end{eqnarray}
と書ける。
前々節で、運動エネルギーが相対座標系と重心系とに分けることが出来ることが分かったので、 ここで計算した座標系を相対座標系であったとして考えれば、相対座標系でも同様の結果が得られる。 その場合には座標は相対座標\(\v {s}\)であり、速度は相対速度\(\dot {\v {s}}\)であり、 角速度\(\v {w}\)は重心周りの角速度となる。
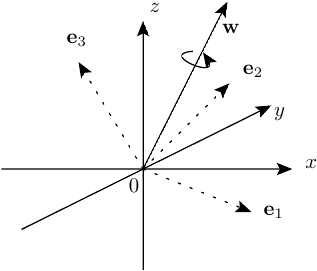
剛体の力学
図で表しているように通常の直交座標系系\((x,y,z)\)から見て、3つの正規直交基底を張る単位ベクトル \(\v {e}_1,\v {e}_2,\v {e}_3\)により張られる座標系が角速度\(\v {w}\)で回転している場合を考える。 即ち、ベクトル\(\v {e}_i\ \ (i=1,2,3)\)は
\begin{eqnarray} \dot {\v {e}}_i=\v {w}\times \v {e}_i \end{eqnarray}
を満たし、\(i,j=1,2,3\)に対して\(\v {e}_i\cdot \v {e}_j=\delta _{ij}\)であり、これらが右手系 である、即ち
\begin{eqnarray} \v {e}_i\times \v {e}_j=\varepsilon _{ijk}\v {e}_k \end{eqnarray}
とする。今ベクトル\(\v {x}\)が
\begin{eqnarray} \v {x}=\left ( \begin {array}{c} x\\ y\\ z\\ \end {array} \right ) =\xi _i\v {e}_i \end{eqnarray}
と書けるとする。
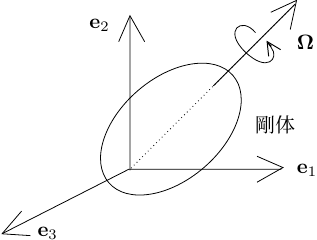
今剛体が\(\v {e}_1,\v {e}_2,\v {e}_3\)で張られる座標系から見て角速度\(\v {\Omega }\) で回転しているとする(下図)。
即ち
\begin{eqnarray} \dot {\xi }_i\v {e}_i&=&\varepsilon _{ijk}\Omega _i\xi _j\v {e}_k \nonumber \\ &=&\v {\Omega }\times \v {x} \end{eqnarray}
である。この時\((x,y,z)\)座標系で見た時の剛体の速度\(\dot {\v {x}}\)は
\begin{eqnarray} \dot {\v {x}}&=&\v {\Omega }\times \v {x}+\v {w}\times \v {x} \nonumber \\ &=&(\v {\Omega }+\v {w})\times \v {x} \end{eqnarray}
従って角速度は
\begin{eqnarray} \v {L}&=&\int _{D_t}\rho \v {x}\times \dot {\v {x}}dV \nonumber \\ &=&\int _{D_t}\rho \v {x}\times (\v {\Omega }\times \v {x})dV+\int _{D_t}\rho \v {x}\times (\v {w}\times \v {x})dV \nonumber \\ &=&\v {L}_\Omega +\v {L}_\omega \end{eqnarray}
ここで\(\v {L}_\Omega \)は\(\v {e}_1,\v {e}_2,\v {e}_3\)で張られる座標系から見た剛体の角運動量。 \(\v {L}_\omega \)は\((x,y,z)\)座標系から見た、剛体の”自転”を無視した角運動量である。 これは慣性モーメントを用いても導くことが出来る。即ち
\begin{eqnarray} \v {L}&=&\hat {I}(\v {\Omega }+\v {w}) \nonumber \\ &=&\hat {I}\v {\Omega }+\hat {I}\v {w} \nonumber \\ &=&\v {L}_\Omega +\v {L}_\omega \end{eqnarray}
となる。従って角運動量は重心系の回転運動(歳差運動)と 剛体の自転運動とに分けて考えることが出来る。
オイラー方程式
剛体が\(\v {e}_1,\v {e}_2,\v {e}_3\)で張られる座標系とともに回転している場合を考える。 慣性モーメントは対称行列であるので、対角化することが出来る。 慣性モーメントを正規直交ベクトル\(\v {e}_1,\v {e}_2,\v {e}_3\)により張られる座標系で表示した時に 対角化される時、\(\v {e}_1,\v {e}_2,\v {e}_3\)を慣性主軸という。 一般的に剛体が回転対称性を持つ場合には、例えば\(\v {e}_3\)を対称軸に選べば、慣性モーメントは 対角化される。 慣性主軸で角速度\(\v {\omega }\)を表して
\begin{eqnarray} \v {\omega }=\omega _i\v {e}_i \end{eqnarray}
と書けるとすると、慣性モーメントの\(\v {e}_i\)成分を\(I_i\)とすれば
\begin{eqnarray} \hat {I}\v {e}_i=I_i\v {e}_i \end{eqnarray}
と書ける。従って自転の角運動量\(\v {L}_\omega \)は
\begin{eqnarray} \v {L}_\omega &=&\hat {I}\v {\omega } \nonumber \\ &=&I_i\omega _i\v {e}_i \end{eqnarray}
よって自転のトルクは
\begin{eqnarray} \v {N}_\omega &:=&\dot {\v {L}}_\omega \nonumber \\ &=&I_i\dot {\omega }_i\v {e}_i+I_i\omega _i\dot {\v {e}}_i \nonumber \\ &=&I_i\dot {\omega }_i\v {e}_i+I_i\omega _i\v {w}\times \v {e}_i \end{eqnarray}
ここで
\begin{eqnarray} \v {w}\times \v {e}_i&=&w_j\v {e}_j\times \v {e}_i \nonumber \\ &=&\varepsilon _{jik}w_j\v {e}_k \end{eqnarray}
よって
\begin{eqnarray} \v {N}_\omega &=&\dot {\v {L}}_\omega \nonumber \\ &=&(I_i\dot {\omega }_i+\varepsilon _{ijk}I_k\omega _kw_j)\v {e}_i \nonumber \\ &=&N_{\omega i}\v {e}_i\ \ \ \ \ \ (\v {N}=N_i\v {e}_i) \end{eqnarray}
成分で書くと
\begin{eqnarray} &&\cdot \ I_1\frac {d}{dt}\omega _1-I_2\omega _2w_3+I_3\omega _3w_2=N_{\omega 1} \\ &&\cdot \ I_2\frac {d}{dt}\omega _2-I_3\omega _3w_1+I_1\omega _1w_3=N_{\omega 2} \\ &&\cdot \ I_3\frac {d}{dt}\omega _3-I_1\omega _1w_2+I_2\omega _2w_1=N_{\omega 3} \end{eqnarray}
となる。これをオイラー方程式という。
ラグランジュ形式
仮想仕事の原理
物体に様々な外力が働いて全体として釣り合っている場合、合力を\(\v {F}\)と書けば釣り合いの条件 は当然\(\v {F}=0\)となる。そこで今釣り合いの位置に物体が存在している時には、その位置から 微小な変位\(\delta \v {x}\)を取ったとしても外力は仕事をしない。従って
\begin{eqnarray} \delta W=\v {F}\cdot \delta \v {x}=0 \end{eqnarray}
となる。これは釣り合いの条件であるので、逆にこの条件から釣り合いの位置を求めることも 出来る。これを仮想仕事の原理という。今外力が全て保存力である場合、即ちある関数\(V\)があり \(\v {F}=-\frac {\pd V}{\pd \v {x}}\)である場合には上の条件式は
\begin{eqnarray} \frac {\pd V}{\pd \v {x}}\cdot \delta \v {x}=0 \end{eqnarray}
これは幾何学的には釣り合いの位置がポテンシャル\(V\)の極値であることを意味している。 極値がポテンシャルの最小値である場合には安定である。即ち釣り合いの位置から少しずれても 力が最小点方向へ働くのでもとの位置に戻るからである1
。この場合、この点を安定点という。 逆に最大値である場合には不安定である。即ち釣り合いの位置から少しでもずれれば、力が
この点から離れる方向へ働くために最大点から離れてしまうからである。この場合、不安定点 という。
ダランベールの原理
次に物体が\(f(\v {x})=0\)で与えられた局面内に拘束されている場合を考える。 \(f=0\)で与えられる局面を拘束面と呼ぶ。1次元で与えられる場合には拘束線である。 例えばレールに沿って運動するような場合や、回転する曲がらない棒に固定された球の運動など である。この場合には 物体に力\(\v {F}\)が働いていても加速度の方向は一般にはその方向へは向かない。\(f=0\)で与えられる 局面から外れる方向への力が打ち消されるように拘束面から力を受けるためである。 このような力を拘束力という。一般に拘束面に摩擦などがない場合には拘束力は拘束面に垂直に 働く。拘束面に平行な成分へ力を与える要素がないからである。この場合には滑らかな拘束である という。通常は拘束が滑らかでない場合にも拘束面に平行な成分を摩擦力などとして、垂直成分 を拘束力と見なして滑らかな拘束の場合に帰着できる。従って以下では拘束力が存在する場合にも 拘束は滑らかであると仮定する。
物体に外力\(\v {F}\)と拘束力\(\v {f}\)が働いている場合には運動方程式は
\begin{eqnarray} m\frac {d^2\v {x}}{dt^2}=\v {F}+\v {f} \label {unndou-kousoku} \end{eqnarray}
で与えられる。拘束力\(\v {f}\)は拘束面に垂直方向であるために、拘束面内での微小変分 \(\delta \v {x}\)に対して\(\v {f}\cdot \delta \v {x}=0\)である。つまり
\begin{eqnarray} \left (m\frac {d^2\v {x}}{dt^2}-\v {F}\right )\cdot \delta \v {x}=0 \end{eqnarray}
を得る。これをダランベールの原理という。
未定乗数法
ここでは一般的に物体が\(n\)個存在する場合に拡張して考える。 物体に番号を振り、\(i\)番目の物体の質量、位置ベクトルなどを\(m_i,\v {x}_i\) などと書くことにする。この時、ダランベールの原理は
\begin{eqnarray} \sum _{i=1}^n\left (m_i\frac {d^2\v {x}_i}{dt^2}-\v {F}_i\right )\cdot \delta \v {x}_i=0 \end{eqnarray}
となる。さらに拘束条件
\begin{eqnarray} f_l(\v {x}_1,\cdots ,\v {x}_n)=0\ \ \ \ (l=1,2,\cdots ,h) \end{eqnarray}
が与えられているとする。まず簡単な幾何学的な事実として 拘束条件\(f=0\)が与えられた場合には、拘束面内の任意の微小変分\(\delta \v {x}\)に対して \(f\)の値は変化しないので
\begin{eqnarray} \delta f=\frac {\pd f}{\pd \v {x}}\cdot \delta \v {x}=0 \end{eqnarray}
となる。これは\(\frac {\pd f}{\pd \v {x}}\)が拘束面に垂直方向のベクトルであることを 意味している。これは各\(f_l\)に対する場合へも容易に拡張出来る。即ち
\begin{eqnarray} \delta f_l=\frac {\pd f_l}{\pd \v {x}_i}\cdot \delta \v {x}_i=0\ \ \ \ \ (i=1,2,\cdots ,n) \end{eqnarray}
さらに\(\frac {\pd f_l}{\pd \v {x}_i}\)が拘束面に垂直方向を向いていることを 利用して、\(i\)番目の物体に働く拘束力を\(\frac {\pd f_l}{\pd \v {x}_i}\)を用いて \(\sum _l\lambda _l\frac {\pd f_l}{\pd \v {x}_i}\)と表し、 (51)を書き直した式
\begin{eqnarray} m_i\frac {d^2\v {x}_i}{dt^2}=\v {F}_i+\sum _{l=1}^h\lambda _l\frac {\pd f_l}{\pd \v {x}_i} \end{eqnarray}
と\(f=0\)の条件から未知数を求めることが出来る。この場合未知数は\(\v {x}_i,\lambda _l\) の\(3n+h\)個存在する。条件式は上の運動方程式\(3n\)個と拘束条件\(f_l=0\)の\(h\)個で全部で \(3n+h\)個あるので、全て求めることが出来る。 一般的に、これらの条件で決まる\(\lambda _l\)は\(\v {x}_i\)に依存するが、 これは拘束力を\(\pdiff {f_l}{\v {x}_i}\)の線形結合で表した時の係数\(\lambda _l\) が位置によって変わるということを意味している。 この方法を未定乗数法という。
数学小話
ここでは未定乗数法に関して少し幾何学的な観点から補足的な小話。 \(n\)次元空間\(\mathbb {R}^n\)上の関数\(f=f(\v {x})\)が\(m\)個の拘束条件\(g_i(\v {x})=0\ (i=1,2,\cdots ,m)\)の条件のもとでの最大値を求める問題などでラグランジュの未定乗数法が用いられる。
拘束条件がなければナイーブには\(\pdiff {f}{\v {x}}(\v {a})=0\)を満たすところを探すことになる。 その\(\v {a}\)の近傍では
\begin{eqnarray} f(\v {a})-f(\v {a}+\Delta \v {a})=-\pdiff {f}{\v {x}}(\v {a}+\Delta \v {a})\cdot \Delta \v {a}+o(|\Delta \v {a}|) \end{eqnarray}
となるので、\(f\)が\(\v {a}\)で最大となるのであれば左辺は正となる。 従って\(\pdiff {f}{\v {x}}(\v {a}+\Delta \v {a})\)は\(\v {a}+\Delta \v {a}\)から\(\v {a}\)に向かう方向を向いていることがわかる。即ち\(\v {a}\)の周辺の\(\pdiff {f}{\v {x}}\)の向きは\(\v {a}\)に向かっている。
さて、\(m\)個の\(g_i(\v {x})=0\ (i=1,2,\cdots , m)\)の拘束条件がある場合にはそのように簡単にはいかないことがわかる。 上で求めた\(\v {a}\)が拘束条件を満たすとは限らないからである。 拘束条件を満たす適当な点を\(\v {b}\)として、拘束条件を満たす変化\(\Delta \v {b}\)をとると、その変化に対して各\(g_i\)の値が変わらないので、\(\pdiff {g_i}{\v {x}}(\v {b})\cdot \Delta \v {b}=0\)であることがわかる。 つまり各\(i\)に対して、ベクトル\(\pdiff {g_i}{\v {x}}(\v {b})\)は\(g_i=0\)の拘束面と垂直な方向を向いていることがわかる。 従って\(\Delta \v {b}\)の方向として可能な向きというのは、各\(\pdiff {g_i}{\v {x}}(\v {b})\ (i=1,2,\cdots ,m)\)のいずれとも垂直な方向ということになる。 任意の\(i\)に対して、点\(\v {b}\)を始点とする、\(\pdiff {g_i}{\v {x}}(\v {b})\)と直交するベクトルの向きは\(n-1\)次元の方向が可能である。 即ち拘束条件1つに対して、変化が可能な方向が1次元だけ減ることになる。 従って全ての拘束条件を満たす\(\mathbb {R}^n\)の部分空間\(N\)は\(n-m\)次元になることがわかる。
一方、点\(\v {b}\)では一般に\(\pdiff {f}{\v {x}}(\v {b})\)は\(0\)とはならない。従って\(m\)個の拘束条件 \(g_i=0\ (i=1,2,\cdots ,m)\) によって決まる部分空間\(N\)の中での\(\v {b}\)からの変化\(\Delta \v {b}\)に対して\(\pdiff {f}{\v {x}}(\v {b})\cdot \Delta \v {b}\)はまた一般には\(0\)とはならない。 今ある方向への変化\(\Delta \v {b}\)に対して\(\pdiff {f}{\v {x}}(\v {b})\cdot \Delta \v {b}>0\)であるとすると、\(f\)の変化は\(\Delta \v {b}\)が十分小さければ
\begin{eqnarray} f(\v {b}+\Delta \v {b})-f(\v {b})=\pdiff {f}{\v {x}}(\v {b})\cdot \Delta \v {b}+o(|\Delta \v {b}|)>0 \end{eqnarray}
となる。従って\(f(\v {b})\)は最大値とはなりえないことがわかる。 符号が逆の場合には\(\Delta \v {b}\)の向きを逆にとれば同様である。 従って\(\v {b}\)で\(f\)が最大値をとるには\(\v {b}\)からの\(N\) の中での、いかなる方向への変化\(\Delta \v {b}\)に対しても \(\pdiff {f}{\v {x}}(\v {b})\cdot \Delta \v {b}=0\)とならないといけない。 即ち、ベクトル\(\pdiff {f}{\v {x}}(\v {b})\)が部分空間\(N\)の点\(\v {b}\) のいかなる接線ベクトルとも直交しなければいけない。 これはベクトル\(\pdiff {f}{\v {x}}(\v {b})\)が\(\pdiff {g_i}{\v {x}}(\v {b})\ (i=1,2,\cdots , m)\) を基底として張られる\(m\)次元のベクトル空間の元として表すことができる、 即ち\(\pdiff {f}{\v {x}}(\v {b})\)は\(\pdiff {g_i}{\v {x}}(\v {b})\ (i=1,2,\cdots ,m)\)の線形結合で表すことができることを意味する。 つまり\(m\)個の拘束条件\(g_i=0\ (i=1,2,\cdots ,m)\)のもとで\(f\)の最大値を求める問題は、 \(\pdiff {f}{\v {x}}\)が\(\pdiff {g_i}{\v {x}}\)の線形結合で表すことができる点を探す問題となる。 そのような点\(\v {b}\)では適当な定数\(\lambda \)があって
\begin{eqnarray} \pdiff {f}{\v {x}}(\v {b})=\sum _{i=1}^n \lambda _i\pdiff {g_i}{\v {x}}(\v {b}) \end{eqnarray}
と書ける。 従って、問題は次のように言い換えができる。
\begin{eqnarray} L(\v {x}, \lambda _1,\lambda _2,\cdots ,\lambda _m)=f(\v {x})-\sum _i \lambda _i g_i(\v {x}) \end{eqnarray}
に対して
\begin{eqnarray} && \cdot \ \ \pdiff {L}{\v {x}}=0 \\ && \cdot \ \ \pdiff {L}{\lambda _i}=0\ \ \ (i=1,2,\cdots ,m) \end{eqnarray}
を満たす点\(\v {b}\)を探して\(f(\v {b})\)の値を求める問題となる。 実際にはこのようにして求めた点\(\v {b}\)は必ずしも\(f\)の最大値とは限らず、最小値となることもあるので、 実際に\(f\)が最大となるかどうかは\(f\)の2階微分まで見るなどして、もう少し調べる必要がある。
以上が一般的にラグランジュの未定乗数法と呼ばれる手法の幾何学的な観点からの説明である。
ラグランジュ形式
これまでは暗黙のうちに直交座標系で表してきたが、ここからは 一般座標系でも表すことが出来るような形式を説明する。 さらに物体が\(n\)個存在するような場合にもそのままの形式を用いることが出来るように、 それらの座標をまとめて\((x_1,x_2,\cdots ,x_{3n})\)と書くことにする。 ダランベールの原理は
\begin{eqnarray} \sum _{i=1}^{3n}\left (m_i\frac {d^2x_i}{dt^2}-F_i\right )\delta x_i=0 \end{eqnarray}
と書くことが出来る。 また一般座標系での座標\((q_1,q_2,\cdots ,q_{3n})\)との関係式が
\begin{eqnarray} x_i=x_i(q_1,q_2,\cdots ,q_{3n},t) \end{eqnarray}
で与えられているとする。従って\(x_i\)の全微分は
\begin{eqnarray} dx_i=\frac {\pd x_i}{\pd q_j}dq_j+\frac {\pd x_i}{\pd t}dt \end{eqnarray}
となる。また\(q_i\)に対する任意の変分\(\delta q_i\)に対しては
\begin{eqnarray} \delta x_i=\frac {\pd x_i}{\pd q_j}\delta q_j \end{eqnarray}
である。よってダランベールの原理は
\begin{eqnarray} \sum _{i=1}^{3n}\left (m_i\ddot {x}_i-F_i\right )\frac {\pd x_i}{\pd q_j}\delta q_j=0 \end{eqnarray}
と書き換えることが出来る。ここで拘束条件がない場合には各\(\delta q_j\)は任意に取ることが 出来るので、その場合には
\begin{eqnarray} \sum _{i=1}^{3n}\left (m_i\ddot {x}_i-F_i\right )\frac {\pd x_i}{\pd q_j}=0 \end{eqnarray}
となる。この式の左辺をさらに変形していく。
\begin{eqnarray} \sum _i\left (m_i\ddot {x}_i-F_i\right )\frac {\pd x_i}{\pd q_j} =\sum _i\biggl [\frac {d}{dt}\left (m_i\dot {x}_i\frac {\pd x_i}{\pd q_j}\right ) -m_i\dot {x}_i\frac {d}{dt}\left (\frac {\pd x_i}{\pd q_j}\right )\biggr ] -\sum _iF_i\frac {\pd x_i}{\pd q_j} \end{eqnarray}
ここで
\begin{eqnarray} \dot {x}_i=\frac {\pd x_i}{\pd q_j}\dot {q}_j+\frac {\pd x_i}{\pd t} \end{eqnarray}
であるので、\(\dot {q}_j\)を独立変数として扱えば
\begin{eqnarray} \frac {\pd x_i}{\pd q_j}=\frac {\pd \dot {x}_i}{\pd \dot {q}_j} \end{eqnarray}
となる。また
\begin{eqnarray} \frac {d}{dt}\left (\frac {\pd x_i}{\pd q_j}\right ) &=&\frac {\pd ^2 x_i}{\pd q_k\pd q_j}\dot {q}_k+\frac {\pd x_i}{\pd t\pd q_j} \nonumber \\ &=&\frac {\pd }{\pd q_j}\left (\frac {\pd x_i}{\pd q_k}\dot {q}_k+\frac {\pd x_i}{\pd t}\right ) \nonumber \\ &=&\frac {\pd }{\pd q_j}\left (\frac {dx_i}{dt}\right ) \nonumber \\ &=&\frac {\pd \dot {x}_i}{\pd q_j} \end{eqnarray}
より
\begin{eqnarray} \sum _i(m_i\ddot {x}_i-F_i)\frac {\pd x_i}{\pd q_j} &=&\sum _i\left [\frac {d}{dt}\left (m_i\dot {x}_i\frac {\pd \dot {x}_i}{\pd \dot {q}_j}\right ) -m_i\dot {x}_i\frac {\pd \dot {x}_i}{\pd q_j}\right ]-\sum _iF_i\frac {\pd x_i}{\pd q_j} \nonumber \\ &=&\frac {d}{dt}\left [\frac {\pd }{\pd \dot {q}_j}\left (\sum _i\frac {1}{2}m_i\dot {x}_i^2\right ) \right ]-\frac {\pd }{\pd q_j}\left (\sum _i\frac {1}{2}m_i\dot {x}_i^2\right )-\sum _iF_i \frac {\pd x_i}{\pd q_j} \end{eqnarray}
従って運動エネルギー\(\sum _i\frac {1}{2}m_i\dot {x}_i^2\)を\(T\)と置き、
\begin{eqnarray} \acute {F}_j=\sum _iF_i\frac {\pd x_i}{\pd q_j} \end{eqnarray}
と置けば
\begin{eqnarray} \left [\left (\frac {d}{dt}\left (\frac {\pd }{\pd \dot {q}_j}\right ) -\frac {\pd }{\pd q_j}\right )T-\acute {F}_j\right ]=0 \end{eqnarray}
となる。ここで\(F_i\)が保存力であるとすると、
\begin{eqnarray} \acute {F}_j&=&-\sum _i\frac {\pd V}{\pd x_i}\frac {\pd x_i}{\pd q_j} \nonumber \\ &=&-\frac {\pd V}{\pd q_j} \end{eqnarray}
となる。従って
\begin{eqnarray} L&=&T-V \nonumber \\ &=&\sum _i\frac {1}{2}m_i\dot {x}_i^2-V \end{eqnarray}
と置けば、
\begin{eqnarray} \left [\frac {d}{dt}\left (\frac {\pd }{\pd \dot {q}_j}\right )-\frac {\pd }{\pd q_j}\right ]L=0 \end{eqnarray}
となる。\(L\)をラグランジアンといい、この方程式をオイラー・ラグランジュ方程式という。 以上のことからわかるようにラグランジアンは
\begin{eqnarray} L=L(q_i,\dot {q}_i,t) \end{eqnarray}
という風に\(q_i,\dot {q}_i,t\)の関数である。 導出方法から分かるように、この方程式は座標系の取り方に依存しない。即ちどんな座標系を 選んでも、ラグランジアンが分かればオイラー・ラグランジュ方程式から運動方程式を導く ことが出来る。このような性質を共変性という。 実際に座標変換のもと形式が不変である(共変性を持つ) ことを確かめるのは読者への演習としたい。
ここで\(q=x\)の場合には\(\frac {\pd L}{\pd \dot {x}_i}=p_i\)は運動量である。 一般に
\begin{eqnarray} p_i:=\frac {\pd L}{\pd \dot {q}_i} \end{eqnarray}
を\(q_i\)に共役な正準運動量という。これは一般には通常の運動量\(mv_i\)とは異なることに注意 されたい。
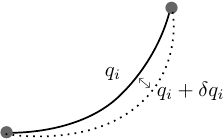
ハミルトンの原理
一般座標\(q_i\)に対して変分\(\delta q_i\)を与えてやることを考える。 変分とは下図のように物体の軌道\(q_i\)を\(\delta q_i\)だけずらすことを意味する。
ラグランジアン\(L=L(q_i,\dot {q}_i,t)\)は
\begin{eqnarray} \delta L&=&\frac {\pd L}{\pd q_i}\delta q_i+\frac {\pd L}{\pd \dot {q}_i}\frac {d}{dt} \left (\delta q_i\right ) \nonumber \\ &=&\left [\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right )\right ] \delta q_i+\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\delta q_i\right ) \end{eqnarray}
となる。右辺二段目の最初の項はオイラー・ラグランジュ方程式の形をしている。 これの意味するところは 作用(作用積分)を
\begin{eqnarray} S:=\int ^t_{t_0}Ldt \end{eqnarray}
で定義した時、時刻\(t\)及び\(t_0\)での\(q_i\)を固定した状態(\(\delta q_i(t)=\delta q_i(t_0)=0\)) で\(t_0\)から\(t\)までの\(q_i(t)\)を 変えていった時の作用の停留点がオイラー・ラグランジュ方程式の解であるということである。 これをハミルトンの原理という。
ハミルトニアン
ラグランジアンをルジャンドル変換したものをハミルトニアンという。 ここでルジャンドル変換とは以下のような変換である。 まずラグランジアン\(L=L(q_i,\dot {q}_i,t)\)において\(q_i,\dot {q}_i,t\)をそれぞれ独立変数と みなす(\(\dot {q}_i\)は\(q_i\)の微分とはここでは全く関係ない変数として扱う)。ルジャンドル 変換は\(p_i\)をまず新しい独立変数として
\begin{eqnarray} H=p_i\dot {q}_i-L(q_i,\dot {q}_i,t) \end{eqnarray}
として与えられる。 これの全微分を取れば
\begin{eqnarray} dH&=&\dot {q}_idp_i+p_id\dot {q}_i-\left (\frac {\pd L}{\pd q_i}dq_i+\frac {\pd L}{\pd \dot {q}_i} d\dot {q}_i+\frac {\pd L}{dt}dt\right ) \nonumber \\ &=&\dot {q}_idp_i+\left (p_i-\frac {\pd L}{\pd \dot {q}_i}\right )d\dot {q}_i -\frac {\pd L}{\pd q_i}dq_i-\frac {\pd L}{\pd t}dt \label {dH} \end{eqnarray}
となる。従って\(\dot {q}_i\)を
\begin{eqnarray} p_i=\frac {\pd L}{\pd \dot {q}_i} \label {momentum} \end{eqnarray}
を満たすように選べば、\(d\dot {q}_i\)の係数が\(0\)となり、 ラグランジアン\(L\)が\(\dot {q}_i\)に依存しなくなり、その代わり\(p_i\)に依存するようになる。 上記(86)はちょうど\(q_i\)に共役な運動量の定義そのものである。 即ちルジャンドル変換とは独立変数を\(\dot {q}_i\)から正準共役な運動量へ変えることに対応 している。この変換のもと\(H\)を書き直せば
\begin{eqnarray} H=\frac {\pd L}{\pd \dot {q}_i}\dot {q}_i-L \label {hamiltonian} \end{eqnarray}
となる。もちろんこの式の右辺に現れる\(\dot {q}_i\)は今は全て(86)によって \(q_i,p_i,t\) の関数として表されているものとする。さて(86)によって\(\dot {q}_i\)が消去できる 条件を求める。消去するには、\(L\)を\(\dot {q}_i\)だけの関数として扱って全微分をとり
\begin{eqnarray} dp_i=\frac {\pd ^2L}{\pd \dot {q}_i\pd \dot {q}_j}d\dot {q}_j \end{eqnarray}
から逆に\(d\dot {q}_i\)を\(dp_i\)で表せばよい。そのためには変換行列が逆行列を持つ必要がある。 即ち
\begin{eqnarray} \det \left (\frac {\pd ^2L}{\pd \dot {q}_i\pd \dot {q}_j}\right )_{ij}\neq 0 \end{eqnarray}
この条件が満たされれば実際に\(\dot {q}_i\)を\(dp_i\)で表すことが出来る。 この条件は多くの場合には満たされている。実際ラグランジアンが
\begin{eqnarray} L&=&\frac {1}{2}m\left (\frac {dx_i}{dt}\right )^2-V(\v {x}) \nonumber \\ &=&\frac {1}{2}mg_{ij}\frac {dq_i}{dt}\frac {dq_j}{dt}-V \end{eqnarray}
で与えられている場合を考える。ここで\(g_{ij}\)は計量
\begin{eqnarray} g_{kl}=\delta _{ij}\frac {\pd x_i}{\pd q_k}\frac {\pd x_j}{\pd q_l} \end{eqnarray}
である。この場合には
\begin{eqnarray} \frac {\pd ^2L}{\pd \dot {q}_i\pd \dot {q}_j}=mg_{ij} \end{eqnarray}
となり、一般に\(g_{ij}\)は対称行列であり、逆行列を持つ。以下では常にこの条件が満たされている と仮定する。
(87)で与えられる\(H\)をハミルトニアンという。この表式は独立変数を\(p_i\)に 変えない時、即ち独立変数が\(q_i,\dot {q}_i,t\)である場合にも意味を持つ。この場合にも \(H\)をハミルトニアンという。実際ハミルトニアンからラグランジアンにルジャンドル変換 した場合の関係式は
\begin{eqnarray} L=\frac {\pd L}{\pd \dot {q}_i}\dot {q}_i-H \end{eqnarray}
で与えられる。また(86)を\(t\)で微分すると、オイラー・ラグランジュ方程式 を用いれば
\begin{eqnarray} \dot {p}_i=\frac {\pd L}{\pd q_i} \label {dot-p} \end{eqnarray}
となる。従って\(H\)の全微分形(85)より\(H\)の\(t\)での微分(偏微分ではない)が
\begin{eqnarray} \frac {dH}{dt}=-\frac {\pd L}{\pd t}\ \ \left (=\frac {\pd H}{\pd t}\right ) \end{eqnarray}
と求まる。即ちラグランジアン\(L\)が\(t\)にあらわに依存しなければ、ハミルトニアン\(H\)は 運動の間常に一定、つまり保存量であることが分かる。 またハミルトニアンがあらわに\(t\)に依存しない場合にも同様である。 多くの場合においてハミルトニアンは系の全力学的エネルギーに等しいことが示される。 例えば、 運動エネルギーは\(\dot {q}_i\)の二次形式であり、係数に\(\frac {1}{2}\)のfactorが付いている。 ラグランジアンは一般的に運動エネルギーとポテンシャルエネルギーとの差\(T-V\)で与えられる。 従ってこの場合にはハミルトニアンはちょうど\(H=T+V\)の形を取るからである 2
。
従ってラグランジアンが\(t\)にあらわに依存しなければ、系のエネルギーは保存するといえる。
最小作用の原理
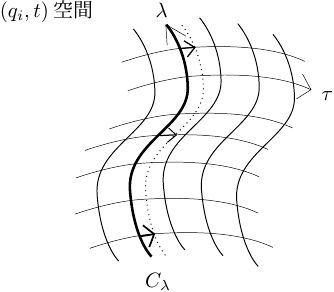
ハミルトンの原理を系のエネルギーが保存する場合(系は保存系であるという) にちょっと書き換えよう。 作用積分は
\begin{eqnarray} S=\int ^{t_1}_{t_0}Ldt \end{eqnarray}
であった。ここで\((q_i,t)\)空間での運動の軌道に沿った曲線を\(C_\lambda \)と表す。ここで \(\lambda \)はその曲線を表すパラメータである。またベクトル場\(\frac {d}{d\tau }\) に沿って曲線\(C_\lambda \)を変形していくことを考える。この変形による変化\(\delta C_\lambda \) が変分である(下図)。
\begin{align} \end{align}
パラメータ\(\lambda \)のとり方から\(\lambda \)と\(t\)は1対1に対応する。また変分は\(\tau \)方向 への変形である。作用積分は\(t_1=t(\lambda _1),t_0=t(\lambda _0)\) と置き、
\begin{eqnarray} S=\int ^{\lambda _1}_{\lambda _0}L\frac {dt}{d\lambda }d\lambda \end{eqnarray}
と書き換えられる。これから\(\tau \)方向への変分を取れば
\begin{eqnarray} \delta S&=&\int ^{\lambda _1}_{\lambda _0}\left (\delta L\frac {dt}{d\lambda } +L\frac {d}{d\lambda }\left (\delta t\right )\right )d\lambda \nonumber \\ &=&\int ^{\lambda _1}_{\lambda _0}\left [\left (\frac {\pd L}{\pd q_i}\delta q_i +\frac {\pd L}{\pd \dot {q}_i}\frac {d}{dt}\left (\delta q_i\right )+\frac {\pd L}{\pd t} \delta t\right )\frac {dt}{d\lambda } +\left (\frac {d}{d\lambda }\left (L\delta t\right )-\frac {dL}{d\lambda }\delta t\right ) \right ]d\lambda \nonumber \\ &=&\int ^{\lambda _1}_{\lambda _0}\left [ \left (\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right ) \right )\left (\delta q_i\frac {dt}{d\lambda }-\frac {dq_i}{d\lambda }\delta t\right ) +\frac {d}{d\lambda }\left (\frac {\pd L}{\pd \dot {q}_i}\delta q_i\right ) -\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\frac {dq_i}{d\lambda } \right )\delta t\right ]d\lambda \nonumber \\ &&\ \ \ \ \ \ \ \ \ +L\delta t\biggr |^{\lambda _1}_{\lambda _0} \nonumber \\ &=&\biggl (2\frac {\pd L}{\pd \dot {q}_i}\delta q_i-H\delta t \biggr )\biggr |^{\lambda _1}_{\lambda _0} -\delta \int ^{\lambda _1}_{\lambda _0}\frac {\pd L}{\pd \dot {q}_i}\frac {dq_i}{d\lambda }d\lambda +\int ^{\lambda _1}_{\lambda _0} \left [ \left (\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right ) \right )\left (\delta q_i\frac {dt}{d\lambda }-\frac {dq_i}{d\lambda }\delta t\right ) \right ]d\lambda \label {deltaS} \end{eqnarray}
一方、この変分をエネルギー(ハミルトニアン)が一定の\(H=E\)の曲面内に制限して考えれば
\begin{eqnarray} \delta \int ^{t_1}_{t_0}Hdt=E\delta t\biggr |^{\lambda _1}_{\lambda _0} \end{eqnarray}
従ってこれを足し合わせてまとめると
\begin{eqnarray} \delta \int ^{t_1}_{t_0}2\frac {\pd L}{\pd \dot {q}_i}\frac {dq_i}{d\lambda }d\lambda =2p_i\delta q_i\biggr |^{\lambda _1}_{\lambda _0} +\int ^{\lambda _1}_{\lambda _0} \left [ \left (\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right ) \right )\left (\delta q_i\frac {dt}{d\lambda }-\frac {dq_i}{d\lambda }\delta t\right ) \right ]d\lambda \label {deltaaction} \end{eqnarray}
従って\(\lambda =\lambda _1,\lambda _0\)での\(\tau \)方向への\(q_i\)の変分\(\delta q_i\) を固定しておけば
\begin{eqnarray} \delta \int _{C_\lambda }2p_idq_i =\int ^{\lambda _1}_{\lambda _0} \left [ \left (\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right ) \right )\left (\delta q_i\frac {dt}{d\lambda }-\frac {dq_i}{d\lambda }\delta t\right ) \right ]d\lambda \label {mini-action-p} \end{eqnarray}
を得る。ここで\(p_i=\frac {\pd L}{\pd \dot {q}_i}\)である。
\begin{eqnarray} I=\int _{C_\lambda }p_idq_i \end{eqnarray}
も作用と呼ばれる。文献によっては作用積分\(S\)を第一積分と呼んでいたりする。 少々紛らわしいが、文脈によってどちらをさしているかを読み取ってもらいたい。 上記(102)の意味するところは、系が保存系である時には、変分を 等エネルギー曲面内に制限して、また端点の\(q_i\)を固定して取った時、作用が停留する ものがオイラー・ラグランジュ方程式の解であるということである。 (注意点は端点での\(t\)は固定する必要がないということである。というより実は 変分を等エネルギー面内に制限する限り、固定できない。端点での\(\delta t\)は 変動しても\(\delta q_i\)は変動しないように変分を取るのである。) これを最小作用の原理という。
ネータの定理
ラグランジアン\(L=L(q_i,\dot {q}_i,t)\)がある\(q_i\)の変分\(q_i\rightarrow q_i+\delta q_i\) に対して不変である場合を考える。これは系がこの変分に対して対称性を持っていることを 意味している。この変分に対してラグランジアンは
\begin{eqnarray} 0=\delta L=\biggl [\frac {\pd L}{\pd q_i}-\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\right ) \biggr ]\delta q_i+\frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\delta q_i\right ) \end{eqnarray}
となるので、\(q_i\)がオイラー・ラグランジュ方程式を満たすならば
\begin{eqnarray} \frac {d}{dt}\left (\frac {\pd L}{\pd \dot {q}_i}\delta q_i\right )=0 \end{eqnarray}
となる。即ち\(p_i\delta q_i\)は保存量である。逆にある\(p_i\delta q_i\)が保存量であるならば ラグランジアンは\(q_i\rightarrow q_i+\delta q_i\)の変分に対して不変である、即ち 対称性を持つことが分かる。つまり対称性の存在と保存量\(p_i\delta q_i\)の存在は同値である。 これをネータの定理という。
例を見てみよう。ある定数ベクトル\(\lambda _i\)方向への変分\(\delta q_i=\varepsilon \lambda _i\) に対してラグランジアンが不変である場合。これは系が\(\lambda _i\)方向への並進対称性を持つ ことを意味している。この場合には\(p_i\lambda _i\)は保存量となる。\(p_i\lambda _i\)はまさに \(\lambda _i\)方向の\(q_i\)に共役な運動量を表している。即ち並進対称性を持つことは、運動量 が保存することと同値なのである。
次に系が回転対称性を持つ場合を考える。簡単のため1質点の場合を考える。 質点の座標を直交座標\(\v {x}=(x_1,x_2,x_3)\)で表すことにする。 回転対称性を持つ例として、クーロンポテンシャル\(V=-\frac {e^2}{|\v {x}|}\)で与えられる系などが ある。 回転は一般に
\begin{eqnarray} M^1=\left ( \begin {array}{ccc} 0&0&0\\ 0&0&-1\\ 0&1&0\\ \end {array} \right ),\ \ \
M^2=\left ( \begin {array}{ccc} 0&0&1\\ 0&0&0\\ -1&0&0\\ \end {array} \right ),\ \ \
M^3=\left ( \begin {array}{ccc} 0&-1&0\\ 0&0&0\\ 1&0&0\\ \end {array} \right ) \end{eqnarray}
なる行列により生成されるフローにより生成される。一般には回転群は
\begin{eqnarray} U(\v {w})=\exp (\v {w}\cdot \v {M}) \end{eqnarray}
と書ける。このような群は\(SO(3)\)と呼ばれる。\(\v {x}\)への作用は通常の行列の作用
\begin{eqnarray} \v {x}_{\v {w}}=U(\v {w})\v {x} \end{eqnarray}
である。従って\(\v {w}\)方向への\(\v {w}\)の変分\(\delta \v {w}\)による、\(\v {x}\)の 変分\(\delta \v {x}\)は
\begin{eqnarray} \delta \v {x}&=&(\delta \v {w}\cdot \v {M})\v {x} \end{eqnarray}
である。従って保存量は
\begin{eqnarray} \v {p}\delta \v {x}&=&(\v {p}\cdot M^i\v {x})\delta w^i \nonumber \\ &=&-\varepsilon ^{ijk}p_jx_k\delta w_i \nonumber \\ &=&\delta \v {w}(\v {x}\times \v {p}) \end{eqnarray}
となる。これは\(\v {w}\)軸周りの角運動量に他ならない。即ち回転対称性があることと その回転方向の角運動量の保存が同値であることが分かる。
正準形式
正準方程式
「ハミルトニアン」の節で導いたハミルトニアンの全微分(85)及びオイラー・ラグランジュ 方程式を用いて連立方程式
\begin{eqnarray} \dot {q}_i=\frac {\pd H}{\pd p_i},\ \ \ \ \
\dot {p}_i=-\frac {\pd H}{\pd q_i} \end{eqnarray}
が導かれる。これを正準方程式という。 \(q_i,p_i\)を独立変数として、正準方程式を基本に添えて考えるのが正準形式である。 \(q_i\)を正準座標、\(p_i\)を正準運動量という。またこれらをまとめて正準変数という。 独立変数の数が倍になり、運動方程式の数も倍になる。 また正準変数からなる座標\((q_i,p_i)\)で表される空間を相空間という (位相空間という呼び方もあるが トポロジーと混乱してはいけないのでやめといたほうがよい)。
座標変換のもと\(dq_i\)が反変ベクトルとして、\(dp_i\)が共変ベクトルして振舞うので
\begin{eqnarray} \theta :=p_idq_i \end{eqnarray}
なる1-formが定義できる。これを正準1-formという。これの外微分
\begin{eqnarray} d\theta =dp_i\w dq_i \end{eqnarray}
を正準2-formという。
ここで座標系を\((q_1,q_2,\cdots ,q_n,p_1,p_2,\cdots ,p_n)=(z_1,\cdots ,z_{2n})\) と置くことにする。また\(z\)に関する座標の添え字を\(\mu ,\nu ,\cdots \)等と表すことにする。 ここで\(2n\times 2n\)行列\(\hat {\Omega }\)を
\begin{eqnarray} \hat {\Omega }:=\left ( \begin {array}{cc} 0&-1\\ 1&0\\ \end {array} \right ) \end{eqnarray}
(\(1\)は\(n\times n\)の単位行列)で定義すれば
\begin{eqnarray} d\theta =\frac {1}{2}\Omega _{\mu \nu }dz^\mu \w dz^\nu \end{eqnarray}
とも書ける。この\(\hat {\Omega }\)及び\(\v {z}=(z_1,\cdots ,z_{2n})\)を用いて正準方程式は
\begin{eqnarray} \dot {\v {z}}=\hat {\Omega }^t\cdot \nabla H \label {hami-flow} \end{eqnarray}
と書ける。ここで\(\nabla =\frac {\pd }{\pd \v {z}}\)である。
正準形式でのハミルトンの原理
作用積分を書けば
\begin{eqnarray} S=\int ^t_{t_0}(p_i\dot {q}_i-H(q_i,p_i))dt \end{eqnarray}
と書ける(ハミルトニアンが\(t\)に依存しても以下での議論に影響を与えないので 省略して書いている)。ここで\(q_i\)、\(p_i\)での変分を取れば
\begin{eqnarray} \delta S&=&\int ^t_{t_0}\left (\delta p_i\dot {q}_i+p_i\frac {d}{dt}\delta q_i -\left (\frac {\pd H}{\pd q_i}\delta q_i+\frac {\pd H}{\pd p_i}\delta p_i\right )\right )dt \nonumber \\ &=&\int ^t_{t_0}\left (\left (\dot {q}_i-\frac {\pd H}{\pd p_i}\right )\delta p_i -\left (\dot {p}_i+\frac {\pd H}{\pd q_i}\right )\delta q_i\right )dt +p_i\delta q_i\biggr |^t_{t_0} \end{eqnarray}
従って正準形式においても端点での\(q_i\)を固定した変分のもと作用積分が停留する ような経路は正準方程式の解であるという正準形式でのハミルトンの原理が成立する。
ハミルトニアン・フロー
前節で求めた正準方程式(116)はベクトル場(1-vector) \(\v {v}_H:=\hat {\Omega }^t\cdot \nabla H\)により生成されるフローが正準方程式の解を与える ことを意味している。このベクトル場をハミルトニアン・ベクトル場という。定義により ハミルトニアン・ベクトル場の発散をとると \(\mathrm {div}\v {v}_H=\nabla \cdot \hat {\Omega }^t\cdot \nabla H=0\)となる。 ここで相空間内の適当な領域\(D\)を取る。 \(D\)はハミルトニアン・ベクトル場により生成される フロー\(\phi _t\)(ハミルトニアン・フローという)により時刻\(t\)には領域\(D_t\)へ移る。 この領域\(D_t\)の体積は
\begin{eqnarray} V_t=\int _{D_t}dz_t^1\w \cdots \w dz_t^N\ \ \ \ \ (N=2n) \end{eqnarray}
で定義すれば
\begin{eqnarray} \frac {dV_t}{dt}&=&\frac {d}{dt}\int _{D}J_tdz_0^1\w \cdots \w dz_0^N\ \ \ \ \ \ \ \ \
J_t=\frac {\pd (z_t^1,\cdots ,z_t^N)}{\pd (z_0^1,\cdots ,z_0^N)} \nonumber \\ &=&\int _D\mathrm {div}\v {v}_HJ_tdz_0^1\w \cdots \w dz_0^N \nonumber \\ &=&0 \end{eqnarray}
と不変である。この事実をリュウビルの定理という。
リュウビルの定理を応用して面白い定理を証明できる。 まず系のエネルギーが保存するとする。さらに正準変数の空間内の等エネルギー面が有界である とする。すると、等エネルギー面内の任意の領域\(D\)に対して時刻\(t\)には\(D\)は\(\phi _{t}(D)\) へ移る。さらに時間\(t\)後には\(\phi _{2t}(D)\)へ移る。という風にして 時刻\(nt\)後には領域\(D\)は\(\phi _{nt}(D)\)へと移っていく。そうしていく内にある\(nt\)で \(D\cap \phi _{nt}(D)\neq \emptyset \)となる。なぜなら等エネルギー面全体の領域の体積が有限である からである。この共通領域を\(U_1\)ととる。さらにこの\(U_1\)に対して同じようにフローに沿って 変形していく。こうしてまたある\(t\)で\(\phi _t(U_1)\cap U_1\neq \emptyset \)となるのでその領域 を\(U_2\)とする。この操作をずっと繰り返せば
\begin{eqnarray} U_1\supset U_2\supset U_3\supset \cdots \supset U_n\supset \cdots \end{eqnarray}
の列が出来る。従って等エネルギー面内の任意の点\(p\)をとり、\(p\)の任意の近傍をとっても その中に繰り返し戻ってくるような点が存在することが分かる。 これをポアンカレの再帰定理という。
正準変換
2つの正準座標系\(\v {z}=(\v {q},\v {p})\)と\(\v {Z}=(\v {Q},\v {P})\)に対してこれらの座標系の間の座標変換 を正準変換という。\(\v {z}\)の座標系での正準方程式は、\(\hat {\Omega }^t\)の成分を \(\Omega ^{\mu \nu }\)と書けば
\begin{eqnarray} \dot {z}^\mu =\Omega ^{\mu \nu }\frac {\pd }{\pd z^\nu }H \end{eqnarray}
と書ける。一方で\(\v {Z}\)の座標系での同様に書けることから
\begin{eqnarray} \frac {\pd \v {Z}}{\pd \v {z}}\hat {\Omega }^t\frac {\pd \v {Z}}{\pd \v {z}}^t=\hat {\Omega }^t \ \ \ \ \ \ \ \biggl ( \frac {\pd \v {Z}}{\pd \v {z}}\hat {\Omega }\frac {\pd \v {Z}}{\pd \v {z}}^t=\hat {\Omega }\biggr ) \end{eqnarray}
でないといけない。これはちょっと変形すれば
\begin{eqnarray} \frac {\pd \v {Z}}{\pd \v {z}}^t\hat {\Omega }\frac {\pd \v {Z}}{\pd \v {z}}=\hat {\Omega } \label {seijun-henkan} \end{eqnarray}
とも書ける。 逆に座標変換行列がこの条件を満たすならば新しい座標系においても 正準方程式を満たすので、正準変換である。即ち(124)は正準変換であるための 必要十分条件である。
次に別の正準変換の表現を与えよう。正準座標系\(\v {z}\)で書き表したハミルトニアンを\(H\)で、 \(\v {Z}\)で書き表したハミルトニアンを\(K\)で表すとしよう。 この時、どちらの表現に対しても ハミルトンの原理が成り立つことから、任意パラメータ\(\lambda \)を用いて
\begin{eqnarray} \delta \int ^t_{t_0}\biggl ((p_i\dot {q}_i-H)-\lambda (P_i\dot {Q}_i-K)\biggr )dt=0 \end{eqnarray}
が成り立つ。これはある関数\(W=W(\v {q},\v {Q},t)\)があって
\begin{eqnarray} \frac {dW}{dt}=(p_i\dot {q}_i-H)-\lambda (P_i\dot {Q}_i-K) \end{eqnarray}
と書けることを意味している。従って\(\lambda =1\)と取れば
\begin{eqnarray} p_idq_i-Hdt=P_idQ_i-Kdt+dW \label {seijun-henkan3} \end{eqnarray}
の関係が得られる。さてこれを\((\v {q},\v {Q},t)\)からなる\(N+1\)次元空間で定義された1-form であると考えるならば、これの外微分はまとめると
\begin{eqnarray} dp_i\w dq_i-dP_i\w dQ_i-d(H-K)\w dt=d^2W=0 \end{eqnarray}
である。ここで\(\v {q}\)、\(\v {Q}\)それぞれが正準方程式を満たしているとすると \(\frac {\pd H}{\pd t}=\frac {dH}{dt}\)、\(\frac {\pd K}{\pd t}=\frac {dK}{dt}\)であったので
\begin{eqnarray} d(H-K)\w dt=\left (\frac {dH}{dt}-\frac {dK}{dt}\right )dt\w dt=0 \end{eqnarray}
となり、結局
\begin{eqnarray} dq_i\w dp_i=dP_i\w dQ_i \label {seijun-henkan2} \end{eqnarray}
が得られる。これは\(\v {z}\)から\(\v {Z}\)への座標変換が(124)を満たすことを 意味している。 用意に分かるように(124)と(130)の条件は同値である。 上で与えた\(W(\v {q},\v {Q},t)\)を正準変換の母関数という。
最後に連続的な正準変換について説明する。ベクトル場\(\v {v}\)により生成されるフローを \(\phi _\lambda \)とした時、\(\phi _\lambda (\v {z})=\v {z}_\lambda \)と置く。 まず\(\phi _\lambda :\v {z}\rightarrow \v {z}_\lambda \)が正準変換であると仮定すると、 条件
\begin{eqnarray} 0=\frac {d}{d\lambda }\left (\frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\hat {\Omega } \frac {\pd \v {z}_\lambda }{\pd \v {z}}\right )&=& \frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\left (\frac {\pd \v {v}}{\pd \v {z}_\lambda }^t\hat {\Omega } +\hat {\Omega }\frac {\pd \v {v}}{\pd \v {z}_\lambda }\right )\frac {\pd \v {z}_\lambda }{\pd \v {z}} \nonumber \\ &=&\frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\left ( -\left (\hat {\Omega }\frac {\pd \v {v}}{\pd \v {z}_\lambda }\right )^t +\hat {\Omega }\frac {\pd \v {v}}{\pd \v {z}_\lambda }\right )\frac {\pd \v {z}_\lambda }{\pd \v {z}} \end{eqnarray}
従って条件は成分で書くと
\begin{eqnarray} \frac {\pd }{\pd z_\rho }(\Omega _{\mu \nu }v^\nu ) =\frac {\pd }{\pd z_\mu }(\Omega _{\rho \nu }v^\nu ) \end{eqnarray}
となる。これは\(\omega =\Omega _{\mu \nu }v^\nu dz^\mu \)で定義される1-formに対して \(d\omega =0\)であることを意味している。従ってポアンカレの補題より、ある関数\(F\)があり、 \(dF=\omega \)と書けることを意味している。即ち\(\nabla F=\hat {\Omega }\cdot \v {v}\)である。 従って両辺に\(\hat {\Omega }^t=\hat {\Omega }^{-1}\)をかければ
\begin{eqnarray} \v {v}=\hat {\Omega }^t\cdot \nabla F \label {canonical-flow} \end{eqnarray}
を得る。逆に今度はベクトル場が(133)で与えられた場合には
\begin{eqnarray} \frac {\pd \v {v}}{\pd \v {z}_\lambda }&=&\left (\Omega ^{\mu \nu } \frac {\pd ^2F}{\pd z_{\lambda \nu }\pd z_{\lambda \rho }}\right )_{\mu \rho } \nonumber \\ &=&\hat {\Omega }^t\cdot \pd ^2F \end{eqnarray}
と書けるので、
\begin{eqnarray} \frac {d}{d\lambda }\left (\frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\hat {\Omega } \frac {\pd \v {z}_\lambda }{\pd \v {z}}\right )&=& \frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\left (\frac {\pd \v {v}}{\pd \v {z}_\lambda }^t\hat {\Omega } +\hat {\Omega }\frac {\pd \v {v}}{\pd \v {z}_\lambda }\right )\frac {\pd \v {z}_\lambda }{\pd \v {z}} \nonumber \\ &=&\frac {\pd \v {z}_\lambda }{\pd \v {z}}^t\left ( \pd ^2F^t\cdot \hat {\Omega }\cdot \hat {\Omega }+\hat {\Omega }\cdot \hat {\Omega }^t\cdot \pd ^2F \right )\frac {\pd \v {z}_\lambda }{\pd \v {z}} \nonumber \\ &=&0 \end{eqnarray}
となり、正準変換であることが示される。即ち連続的な正準変換であるための必要十分条件は フローを生成するベクトル場が(133)で与えられることである。 特に正準方程式はちょうど(133)の形のベクトル場により与えられるので、 時間発展は正準変換である。
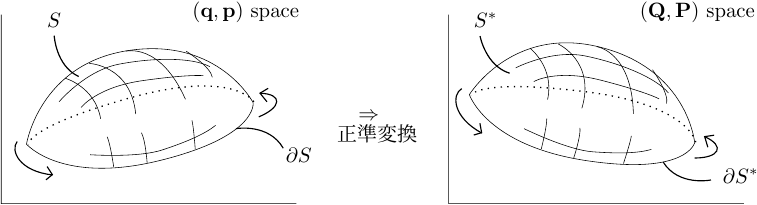
最後に正準座標系\((\v {q},\v {p})\)から\((\v {Q},\v {P})\)へ正準変換した時、 \((\v {q},\v {p})\)相空間上の境界を持つ超曲面\(S\)が、\((\v {Q},\v {P})\)相空間上の 境界を持つ超曲面\(S^*\)へ 移される場合を考える(下図)。
\begin{align} \end{align}
\(\pd S\)(\(S\)の境界)周りの\(p_idq_i\)の積分はストークスの定理により
\begin{eqnarray} \int _{\pd S}p_idq_i=\int _Sdp_i\w dq_i \end{eqnarray}
となるが、\(dp_i\w dq_i\)は正準変換により不変であったので
\begin{eqnarray} \int _{\pd S}p_idq_i=\int _{\pd S^*}P_idQ_i \end{eqnarray}
となる。特に時間発展は正準変換であるので
\begin{eqnarray} J:=\int _{\pd S}p_idq_i \end{eqnarray}
は時間によらず不変量となる。
ポアソン括弧
\(\nabla \)の\(\v {q}=(q_1,q_2,\dots ,q_n)\)に関する成分を\(\nabla _{\v {q}}\)、 \(\v {p}=(p_1,p_2,\dots ,p_n)\)に関する成分を\(\nabla _{\v {p}}\)と置く。 即ち\(\nabla =(\nabla _{\v {q}}, \nabla _{\v {p}})\)とする。 この時正準方程式(116)は
\begin{eqnarray} \dot {\v {z}} = \left ( \begin {array}{c} \nabla _{\v {p}}H\\ -\nabla _{\v {q}}H \end {array} \right ) \end{eqnarray}
のように表せる。
相空間\(\v {z}=(\v {q},\v {p})\)上で定義された関数\(f=f(\v {z},t)\)の時間変化を考えると、
\begin{eqnarray} \diff {f}{t} &=& \pdiff {f}{t}+\dot {\v {z}}\cdot \nabla f \nonumber \\ &=& \pdiff {f}{t} +\nabla _{\v {q}}f\cdot \nabla _{\v {p}}H -\nabla _{\v {q}}H\cdot \nabla _{\v {p}}f \end{eqnarray}
となる。ここでポアソン括弧を
\begin{eqnarray} \{f,H\} &=& \nabla _{\v {q}}f\cdot \nabla _{\v {p}}H -\nabla _{\v {q}}H\cdot \nabla _{\v {p}}f \nonumber \\ &=& \nabla ^t f\cdot \hat {\Omega }^t\cdot \nabla H \end{eqnarray}
と置くと、\(f\)の時間変化は
\begin{eqnarray} \diff {f}{t}=\{f, H\}+\pdiff {f}{t} \end{eqnarray}
と書くことができる。
一般的には、相空間上の関数\(F\)による連続的な正準変換のフローに沿った微分は、 フローのパラメータを\(\lambda \)とすると
\begin{eqnarray} \diff {f}{\lambda }=\{f, F\}+\pdiff {f}{\lambda } \end{eqnarray}
のように書けることが分かる。
ポアソン括弧は\(q_i,p_i\)をあらわに使って書くと
\begin{eqnarray} \{f, H\}=\pdiff {f}{q_i}\pdiff {H}{p_i}-\pdiff {H}{q_i}\pdiff {f}{p_i} \end{eqnarray}
となる。(これまでのように添え字\(i\)に対する和をとる) 改めて相空間上の関数\(f\)の時間発展をあらわに書くと
\begin{eqnarray} \diff {f}{t} = \sum _{i=1}^n \left (\pdiff {f}{q_i}\pdiff {H}{p_i}-\pdiff {H}{q_i}\pdiff {f}{p_i}\right ) +\pdiff {f}{t} \end{eqnarray}
となる。
ハミルトン・ヤコビ理論
前節での記号をほぼそのまま用いる。(127)において 正準座標系\(\v {Z}=(\v {Q},\v {P})\)で表したハミルトニアン\(K\)を\(K=0\)という特殊な場合に考える。 この場合には正準方程式より\(\dot {Z}=0\)である。即ち\(\v {Q},\v {P}\)は定数である。 この時の正準変換の母関数を
\begin{eqnarray} S=S(\v {q},\v {Q},t) \end{eqnarray}
と書けば(127)は
\begin{eqnarray} p_idq_i-P_idQ_i-Hdt=dS \end{eqnarray}
であるので、微係数を比較すれば
\begin{eqnarray} &&\frac {\pd S}{\pd t}+H(\v {q},\v {p},t)=0 \\ &&\v {p}=\frac {\pd S}{\pd \v {q}} \nonumber \end{eqnarray}
なる微分方程式が得られる。これをハミルトン・ヤコビ方程式という。 このハミルトン・ヤコビ方程式を基本にして考えるのがハミルトン・ヤコビ理論である。 逆にハミルトン・ヤコビ方程式が与えられた時、完全解は
\begin{eqnarray} &&S=S_0(\v {q},\v {a},t)+C \\ &&\v {a}=\left ( \begin {array}{c} \alpha _1\\ \alpha _2\\ \vdots \\ \alpha _n\\ \end {array} \right ) \nonumber \end{eqnarray}
の形で与えられる。 ここで\(\alpha _i,C\)は任意定数である。\(\v {a}\)はちょうど上記\(\v {Q}\)に対応する。 従って
\begin{eqnarray} \v {b}=-\frac {\pd S}{\pd \v {a}} \end{eqnarray}
は\(\v {Q}\)に正準共役な運動量\(\v {P}\)に対応する。従って\(\v {b}\)も定数である 3
。 この式から\(\v {q}\)について解いて
\begin{eqnarray} \v {q}&=&\v {q}(\v {a},\v {b},t) \\ \v {p}&=&\v {p}(\v {a},\v {b},t) \nonumber \\ &=&\frac {\pd S}{\pd \v {q}}(\v {q},\v {a},t) \end{eqnarray}
を計算すれば一般解が求まる。
ここでハミルトニアン\(H\)が\(t\)をあらわに含まない場合、即ち\(H=H(\v {q},\v {p})\)と書ける 場合にはハミルトン・ヤコビ方程式はもっと簡単に解ける。\(S\)を
\begin{eqnarray} S=W(\v {q})-Et \end{eqnarray}
と変数分離することが出来て、ハミルトン・ヤコビ方程式は
\begin{eqnarray} &&H(\v {q},\v {p})=E \\ &&\v {p}=\frac {\pd S}{\pd \v {q}}=\frac {\pd W}{\pd \v {q}} \nonumber \end{eqnarray}
と書ける。
以上のようにしてハミルトン・ヤコビ方程式は解くことが出来る。ここで 同じハミルトニアンを与える、2つの正準座標系 \((\v {q}_1,\v {p}_2)\)及び\((\v {q}_2,\v {p}_2)\)のそれぞれに対してハミルトン・ヤコビ方程式 より母関数\(S_1,S_2\)を求めたとすると、
\begin{eqnarray} S_H(\v {q}_1,\v {q}_2,\v {a},t_1,t_2):=S_1(\v {q}_1,\v {a},t_1)-S_2(\v {q}_2,\v {a},t_2) \end{eqnarray}
を定義しよう。ここで
\begin{eqnarray} \frac {\pd S_H}{\pd \v {a}}&=&\frac {\pd S_1}{\pd \v {a}}-\frac {\pd S_2}{\pd \v {a}} \nonumber \\ &=&\v {b}-\v {b} \nonumber \\ &=&0 \end{eqnarray}
であるので、これを用いて\(\v {a}\)について解き、\(S_H\)から\(\v {a}\)を消去すれば、 新しく\(\v {q}_1,\v {q}_2,t_1,t_2\)だけの関数として
\begin{eqnarray} S_H=S_H(\v {q}_1,\v {q}_2,t_1,t_2) \end{eqnarray}
が得られる。これをハミルトンの主関数という。 このハミルトンの主関数は運動方程式により決まる軌道にそった作用積分に等しい。 これを見るには、まず 作用積分\(S\)の変分を取ったものは、(101)を\(2\)で割ったものを(99)へ 足してあげると、\(q_i\)がオイラー・ラグランジュ方程式を満たすとすれば (解に沿った作用積分を\(S_{cl}\)と書くと)
\begin{eqnarray} \delta S_{cl}=(p_i\delta q_i-H\delta t)\biggr |^{\lambda _1}_{\lambda _2} \end{eqnarray}
と書けることが分かる。従って\(S_{cl}\)は端点のみの関数である。従って\(I(\v {q},t)\)を全微分が
\begin{eqnarray} dI=\v {p}d\v {q}-Hdt \end{eqnarray}
で与えられる関数とすれば\(S_{cl}=I(\v {q}_1,t_1)-I(\v {q}_2,t_2)\)となる。一方\(i=1,2\)として
\begin{eqnarray} dS_i=\v {p}_id\v {q}_i-Hdt_i \end{eqnarray}
であるので\(I(\v {q}_i,t_i)\)と\(S_i(\v {q}_i,\v {a},t_i)\)は定数を除いて等しい。従って \(S_{cl}=S_H\)である。
さらに系が保存系であるときには、\(S_i=W_i(\v {q}_i,\v {a})-E(\v {a})t_i\)とかけたので
\begin{eqnarray} W_H:=W_1(\v {q}_1,\v {a})-W_2(\v {q}_2,\v {a}) \end{eqnarray}
を定義できる。この場合にも上と同じようにして\(\v {a}\)を消去して、
\begin{eqnarray} W_H=W_H(\v {q}_1,\v {q}_2) \end{eqnarray}
が得られる。これをハミルトンの特性関数という。容易に分かるようにこれは 運動方程式の解曲線\(C_t\)に沿った(\(\v {q}_2\)から\(\v {q}_1\)までの)積分
\begin{eqnarray} \int _{C_t}\v {p}_id\v {q}_i \end{eqnarray}
に等しい。
自由粒子の運動への応用例
ハミルトン・ヤコビ理論を用いて自由粒子の例を計算してみよう。 ハミルトニアンは
\begin{eqnarray} H=\frac {\v {p}^2}{2m} \end{eqnarray}
で与えられる。従ってハミルトン・ヤコビ方程式は
\begin{eqnarray} \frac {\pd S}{\pd t}+\frac {1}{2m}\left (\frac {\pd S}{\pd \v {q}}\right )^2=0 \end{eqnarray}
である。ハミルトニアンが\(t\)をあらわに含んでいないので変数分離できて
\begin{eqnarray} S=\phi (\v {q})-Et \end{eqnarray}
と書ける。従ってハミルトン・ヤコビ方程式は
\begin{eqnarray} \left (\frac {\pd \phi }{\pd \v {q}}\right )^2=2mE \end{eqnarray}
となる。これは簡単に解けて、
\begin{eqnarray} \phi =\v {a}\cdot \v {q},\ \ \ \ \ \ \ \v {a}^2=2mE \end{eqnarray}
となる。よって
\begin{eqnarray} S&=&\v {a}\cdot \v {q}-Et \nonumber \\ &=&\v {a}\cdot \v {q}-\frac {\v {a}^2}{2m}t \end{eqnarray}
ここで\(\v {a}\)に正準共役な運動量に対応する\(\v {b}\)は
\begin{eqnarray} \v {b}&=&\frac {\pd S}{\pd \v {a}} \nonumber \\ &=&\v {q}-\frac {\v {a}}{m}t \end{eqnarray}
従って
\begin{eqnarray} \v {q}=\frac {\v {a}}{m}t+\v {b} \end{eqnarray}
を得る。これは実際に自由粒子の軌道を表している。また、運動量は
\begin{eqnarray} \v {p}=\frac {\pd S}{\pd \v {q}}=\v {a} \end{eqnarray}
である。粒子の運動はこうしてもとまったが、さらにハミルトンの主関数\(S_H\)を求めよう。
\begin{eqnarray} S_H&=&S_1-S_2 \nonumber \\ &=&\v {a}(\v {q}_1-\v {q}_2)-\frac {\v {a}^2}{2m}(t_1-t_1) \end{eqnarray}
従って
\begin{eqnarray} \frac {\pd S_H}{\pd \v {a}}=\v {q}_1-\v {q}_2-\frac {\v {a}}{m}(t_1-t_2)=0 \end{eqnarray}
より
\begin{eqnarray} \v {a}=\frac {m(\v {q}_1-\v {q}_2)}{t_1-t_2} \end{eqnarray}
となり、\(S_H\)は
\begin{eqnarray} S_H=\frac {m(\v {q}_1-\v {q}_2)^2}{2(t_1-t_2)} \end{eqnarray}
と求まる。さらにハミルトンの特性関数\(W_H\)を求めるには
\begin{eqnarray} \frac {\pd S_H}{\pd t_1}&=&-\frac {m(\v {q}_1-\v {q}_2)^2}{2(t_1-t_2)^2} \nonumber \\ &=&-E \end{eqnarray}
より
\begin{eqnarray} W_H&=&S_H-\frac {\pd S_H}{\pd t_1}(t_1-t_2) \nonumber \\ &=&S_H+E(t_1-t_2) \nonumber \\ &=&\sqrt {2mE(\v {q}_1-\v {q}_2)^2} \end{eqnarray}
としてもとまる。
調和振動子
今度は調和振動子を例に計算してみる。 簡単のため1次元調和振動子を考える。 調和振動子とはハミルトニアンが
\begin{eqnarray} H=\frac {p^2}{2m}+\frac {mw^2}{2}q^2 \end{eqnarray}
で与えられる系である。どういう系を表しているかを簡単に説明すると、ポテンシャル エネルギーは\(V=\frac {mw^2}{2}q^2\)であるので、質点の受ける力は
\begin{eqnarray} F=-\frac {dV}{dq}=-mw^2q \end{eqnarray}
である。即ちバネの運動などである。
ハミルトン・ヤコビ方程式は
\begin{eqnarray} \frac {\pd S}{\pd t}+\frac {1}{2m}\left (\frac {\pd S}{\pd q}\right )^2 +\frac {mw^2}{2}q^2=0 \end{eqnarray}
となる。 変数分離すれば
\begin{eqnarray} S=\phi (q)-Et \end{eqnarray}
となり、ハミルトン・ヤコビ方程式は
\begin{eqnarray} \frac {1}{2m}\left (\frac {d\phi }{dq}\right )^2+\frac {mw^2}{2}q^2=E \end{eqnarray}
従って
\begin{eqnarray} S=\pm \int dq\sqrt {2mE-m^2w^2q^2}-Et \end{eqnarray}
従って
\begin{eqnarray} b=\frac {\pd S}{\pd E}=-t\pm \int dq\frac {m}{\sqrt {2mE-m^2w^2q^2}} \end{eqnarray}
ここに現れた積分は\(x=\frac {mwq}{\sqrt {2mE}}\)と置けば
\begin{eqnarray} \int dq\frac {m}{\sqrt {2mE-m^2w^2q^2}}&=&\frac {1}{mw}\int dx\frac {1}{\sqrt {1-x^2}} \nonumber \\ &=&\frac {1}{mw}\arcsin x \end{eqnarray}
と計算出来る。従って
\begin{eqnarray} b=-t\pm \frac {1}{w}\arcsin \left (\frac {mwq}{\sqrt {2mE}}\right ) \end{eqnarray}
\(q\)についてまとめれば
\begin{eqnarray} q=\pm \frac {\sqrt {2mE}}{mw}\sin w(t+b) \end{eqnarray}
と求まる。ハミルトンの主関数は
\begin{eqnarray} S_H&=&S_1-S_2 \nonumber \\ &=&-E(t_1-t_2)\pm \int ^{q_1}_{q_2}dq\sqrt {2mE-m^2w^2q^2} \end{eqnarray}
従って
\begin{eqnarray} 0=\frac {\pd S_H}{\pd E}=-(t_1-t_2)\pm \frac {1}{w}\arcsin \left (\frac {mwq}{\sqrt {2mE}}\right ) \biggr |^{q_1}_{q_2} \end{eqnarray}
ここで
\begin{eqnarray} \theta _2=\arcsin \left (\frac {mwq_2}{\sqrt {2mE}}\right ) \end{eqnarray}
と置き、また
\begin{eqnarray} \phi =w(t-t_2)\ \ \ \ \ \ \ \phi _1=w(t_1-t_2) \end{eqnarray}
と置けば
\begin{eqnarray} q_1&=&\frac {\sqrt {2mE}}{mw}\sin (\pm \phi _1+\theta _2) \nonumber \\ &=&\pm \frac {\sqrt {2mE}}{mw}\sin (\phi _1\pm \theta _2) \end{eqnarray}
これを\(S_H\)に代入すると
\begin{eqnarray} S_H=-E(t_1-t_2)\pm \sqrt {2mE}\int ^{q_1}_{q_2}dq\cos (\phi \pm \theta _2) \end{eqnarray}
さらに
\begin{eqnarray} dq=\pm \frac {\sqrt {2mE}}{mw}w\cos (\phi \pm \theta _2)dt \end{eqnarray}
より
\begin{eqnarray} S=-E(t_1-t_2)+2E\int ^{t_1}_{t_2}dt\cos ^2(\phi \pm \theta _2) \end{eqnarray}
ここで
\begin{eqnarray} \int ^{t_1}_{t_2}dt\cos ^2(\phi \pm \theta _2) &=&\frac {t_1-t_2}{2}+\frac {1}{4w}\sin 2(\phi \pm \theta _2)\biggr |^{t_1}_{t_2} \nonumber \\ &=&\frac {t_1-t_2}{2}+\frac {1}{2w}\biggl (\sin (\phi _1\pm \theta _2)\cos (\phi _1\pm \theta _2) \mp \sin \theta _2\cos \theta _2\biggr ) \end{eqnarray}
従って
\begin{eqnarray} S_H=\frac {E}{w}\biggl (\sin (\phi _1\pm \theta _2)\cos (\phi _1\pm \theta _2) \mp \sin \theta _2\cos \theta _2\biggr ) \end{eqnarray}
ここで
\begin{eqnarray} \sin \theta _2=\frac {mwq_2}{\sqrt {2mE}},\ \ \ \
\cos \theta _2=\pm \frac {mw}{\sqrt {2mE}}\frac {q_1-q_2\cos \phi _1}{\sin \phi _1} \end{eqnarray}
を用いて計算すれば
\begin{eqnarray} \sin (\phi _1\pm \theta _2)\cos (\phi _1\pm \theta _2) =\frac {m^2w^2}{2mE}q_1\frac {q_1\cos \phi _1-q_2}{\sin \phi _1} \end{eqnarray}
となるので、まとめると\(\phi _1=w(t_1-t_2)\)より
\begin{eqnarray} S_H=\frac {mw}{2}\frac {(q^2_1+q_2^2)\cos w(t_1-t_2)-2q_1q_2}{\sin w(t_1-t_2)} \end{eqnarray}
となる。