電磁力学
電磁力学
INTRODUCTION
このnoteの目的は電磁気学の概観を説明することである。 本noteを読まれるにあたり前提とする知識は、基本的な解析学と力学の知識、それから "トポロジー"noteに書かれてる内容程度です ("ゲージ理論"note、"クリフォード代数"noteの内容を理解しているとさらに理解が しやすいと思います)。 このnoteの趣旨について簡単に説明したいと思う。 まず、電磁気学の基本となるMaxwell方程式を導入することからはじめる。 電磁気学で説明できる現象はほとんどMaxwell方程式から導出できるからである。 最初に注意点として述べておくが、 このnoteでは前半部分(特殊相対性理論の章に入るまで)は、 荷電粒子の運動はニュートン力学を基本として記述する。 しかし、ニュートン力学の持つ空間の対称性とMaxwell理論の持つ空間の対称性とは 異なる。簡単に言えば、物理法則が異なる慣性系間で同じ(これを共変的であるという)である ということは、異なる慣性系の間の座標変換のもとで理論の基本的な方程式等が同じ形 でないといけないということを意味している。しかし理論が共変的であるためには、 ニュートン力学は異なる慣性系の間はガリレイ変換によって 座標変換されなければならないが、 Maxwell理論はローレンツ変換によって座標変換されなければならない。 この理由により、従来のニュートン力学で電子の運動を記述するような場合には、慣性系を ひとつ固定して考えざるを得ず、物理法則が慣性系の選び方によらないはずであるという基本的な 思想とそぐわない。 ここで二通りの対処法が考えられる。即ち、ひとつはMaxwell理論に修正を加えるという方向と、 ニュートン力学に修正を加えるという方向である。 必然的にこのどちらかを取らざるを得ない。 詳しい説明は後に説明するので、結論を言えば、ニュートン力学に修正を加えるべきである。 ニュートン力学をローレンツ対称性を持つように修正したものが特殊相対論である。 即ち、電子の運動などの完全な記述は相対論によってはじめてなされる。 ニュートン力学ベースで力学を記述することは 以上のことと相反するようであるが、必ずしも間違いではない。 それは相対論のある特殊な条件においては、ニュートン力学が近似理論として得られるからである。 電子の運動などをニュートン力学を基本として書いた時には、そのような近似が成り立つ状況を 想定していると思って欲しい。次にこのnoteのスタイルについて。 多くの電磁気学の本では、初学者向けのためベクトル解析を基調とした記述の仕方を取っている ように思う。このnoteでは、せっかく微分形式などを他のnoteで説明しているので、 出来るだけそれらと連動させて説明していきたいと思う。 従って読者は必要に応じて他のnoteを参照されたい。
物理についても少し触れておこう。 電磁場とは何であろうか? もちろん数学的に言い表すことは出来る。数学的な言葉を用いるならば、電磁場とは \(U(1)\)ゲージ理論の接続形式(ゲージ場)であるといえる (詳しくは"場の量子論"note参照)。しかしこれでは物理的な概念が持ちにくいと思う。 我々が電磁場を直接的に認識することの出来る最も身近な例は光であると思う。 その他にも電磁気的な現象は身の回りにもありふれている。 例えば身の回りにある電気製品からは電磁場が放射されている。 あるいは静電気や磁石なども電磁気的な現象である。 赤外線通信に使われる赤外線などのように通信にも多く利用されている。 それらは全て電磁力学により扱うことが出来る現象である。 このnoteでそれら全ての現象を取り上げて説明するようなことはしない。 他のnoteにも共通しているように、理解を進めるための助けになるものとなるように心がけた。
さて、自然界には様々な現象があり、それらは様々な種類の相互作用によって説明される。 しかし、それらはもとをたどれば、基本的な4つの相互作用に還元できることが知られている。 強い力、電磁気力、弱い力、重力である。これらは相互作用の強い順番に並べてある。 電場や磁場といったものは、このうちの電磁気力に起因する物理現象を説明する物理量である。 後に説明するように、電場と磁場は統一され、電磁場というひとつの物理的対象として記述される。 電場と磁場は一方がもう一方の影のようなもので、切り離して考えることが出来ない。 例えば、電場しか存在しないような系を考えても、座標変換 (これはローレンツ変換であるべきである)をして別の 座標系で見れば、一般に磁場が現れる 11
注意されたいことは、このことは上述の 「物理法則が慣性系の選び方によらないはずである」という物理学の基本的な思想 とは矛盾しないということである。 座標系をかえれば、当然ながら一般に現象の見え方は変わる。しかし、物理法則は変わっていない。 電場と磁場が存在し、それらと電子との相互作用を記述する基礎となる法則は同じであるからである。 このことは共変性と呼ばれる。一般相対論において、この概念はもっと広く拡張されて、一般 共変性と呼ばれるようになる。ここでは趣旨と異なるのでこれ以上は割愛させてもらう。
Maxwell方程式
電場と磁場
電場や磁場は一般に「場」と呼ばれる物理量である。「場」とはひとことで言えば、空間の関数 として表される物理量のことである。 電場も磁場もどちらもベクトルの形をしてお、 電場はよく\(\v {E}(x)=(E^1(x),E^2(x),E^3(x))\)(時に\((x)\)を省略して\(\v {E}\)とだけ)書く。 磁場は\(\v {B}=(B^1,B^2,B^3)\)と書く。 後に説明するが、電場はベクトル場(1-vector)であるが、磁場は反対称2階共変テンソル (2-vector)である。しかしここではこのことを意識する必要はない。この点がはっきりしてくる までベクトル解析の記述の仕方に従っていく。 さて、電子などの電荷を持った物質は電場と相互作用をする。電場を\(\v {E}\)とし、電荷を持った 物質の電荷を\(e\)、電場から受ける力を\(\v {F}\)とすれば、これらの関係はで与えられる。一方で電荷を持つ物質が磁場から受ける力\(\v {F}\)は、磁場\(\v {B}\)とした時 物質の運動する速度を \(\v {v}\)とすると
で与えられる。後者は特にアンペール力と呼ばれる。 言い方を変えると、以上が電場と磁場の定義である。 もちろんこれには任意性が伴うが、基準とする電荷\(e\)を定めれば電場も磁場も決定される。 ここですでに光速\(c\)が現れているのに違和感を感じる読者は\(\frac {1}{c}\v {B}\)を\(\v {B}\) に置き換えてやるとよい。その場合には光速\(c\)をあらわに書くときには、このnoteと notationが異なることに注意しなければならない。
まとめると電場と磁場が存在する時の、電荷を持った質量\(m\)の物質のニュートンの運動方程式は
となる。
次節以降において特に断らなければ、 光速\(c=2.99792\cdots \times 10^{8}[\mathrm {m}/\mathrm {s}]\)を\(1\)とする 単位系を取るものとする 22
。
クーロンの法則
2つの荷電粒子の間には力が働く。それぞれの電荷を\(e_1,e_2\)とし、それらの間の距離を\(r\) とする。ある正の比例定数\(k\)に対して、力\(F\)はで与えられる。ここで力の方向は2つの荷電粒子を結ぶ直線上にある。\(e_1\)と\(e_2\)が同符号で あれば、離れる向きに、異符号であれば引き合う向きに働く。 力学の作用反作用の法則はここでも成り立っている。 これがクーロンの法則と呼ばれるものである。 またこの力をクーロン力という。 以下では簡単のために\(k=\frac {1}{4\pi }\)となるように単位系をとることにする。
ガウスの法則
さて、ガウスによれば、ある適当な閉曲面\(S\)(\(S\)に囲まれる領域を\(D\)とする)に対して、 電場\(\v {E}\)(1-formと見なす)の\(S\)に垂直成分を積分したものは、 \(S\)に囲まれる領域内に存在する電荷の総和に 等しい。即ち実用上以下の点に注意。境界を持つ、向き付け可能な コンパクトな\(n+1\)次元多様体\(M\)に対して、ストークスの定理
を用いて計算する際には、\(\pd M\)の向きをきちんと定義しなければいけない。 ここでは\(p\in \pd M\)に対して、\(TM_p\)の正に向き付けられた基底\((v_0,v_1,\cdots ,v_n)\)に対して、 \(v_1,\cdots ,v_n\in T(\pd M)_p\)であり、\(v_0\)が\(M\)の外へ向かうベクトル場である時に、 \((v_1,\cdots ,v_n)\)を\(\pd M\)の向きとして定義する。
ここでは3次元Euclid空間\(E\)なので、\(E\)の向きを通常通りに正規直交座標系\((x,y,z)\)に取れば 3次元領域\(D\)の境界\(\pd D\)の向きは右手系(\(D\)の外向きベクトルを軸として反時計回り) に取ることになる。
を得る。これをガウスの法則という。
例えば原点に電荷\(e\)の荷電粒子がひとつだけ存在する場合を考える。この時、位置\(\v {x}\)での 電場は(1)及び、(4)より(1-formで書いて)
で与えられることが分かる。従って原点を中心とする半径\(|\v {x}|\)の球内の領域の、 表面を\(S\)とすれば
となる。また\(S\)が原点を含まない場合には
となる。即ち
である。従って実際にガウスの法則が満たされている。
アンペールの法則
閉曲線\(C\)、\(C\)を境界に持つ曲面を\(S\)とする(\(\pd S=C\))。この時、\(C\)に沿った磁場の積分 は\(S\)を通過する定常電流(即ち時間に依存しない電流)の総和に等しい。 即ち、磁場を\(\v {B}\)(1-form)、定常電流を\(\v {i}\)(1-form)とすると、なる関係がある。\(C\)は任意の閉曲線でいいので、
となる。 これをアンペールの法則という。
では定常電流でない場合にはどうなるか?を考えてみる。 "幾何のお話"noteで説明した、電荷の保存則を復習してみよう。 その前に まず数学の復習として("トポロジー"noteでも説明しているが、ここでもう一度説明しておく)、 境界のない向きのついたコンパクト多様体\(M\)に対して、 \(\omega \in \Omega ^p(M)\)を
と書いた時、Hodge作用素\(*:\Omega ^p(M)\rightarrow \Omega ^{n-p}(M)\)は 体積要素を\(\sigma \)として
で定義された。ここでテンソルの添え字の上げ下げは計量\(g_{ij}\)及びその逆行列\(g^{ij}\) で行う。 以下では時間と空間を含めた4次元空間で考えるので\(n=4\)であり、また計量行列 (\(\eta _{\mu \nu }\)と書く)は以下の利便性を考えて
と取ることにする(これは以下を読み進めていけば納得されるものと思う)。 これの逆行列\(\eta ^{\mu \nu }\)も全く同じ行列となる。 このように時間と空間を一緒にして扱った時、それらからなる計量
を持つ平坦な空間を ミンコフスキー時空という。
また、"幾何のお話"noteで説明したように、 時間成分と空間成分(ここでは空間成分は一般的に\(n\)次元としておく。従って時間と空間を含めた 多様体\(M\)は\(n+1\)次元である)に分けて考える場合には、空間成分だけ考えた場合の 外微分を\(d\)、ホッジ作用素を\(*\)とし、時間成分まで含めて考えた場合の外微分を\(d_M\)、 ホッジ作用素を\(\dagger \)という風に区別して考えると便利である。 ただし\(n\)次元での体積要素は、\(n+1\)次元での体積要素を用いて
で定義してやるとよい。 この時\(\dagger \dagger =(-1)^{p(n+1-p)+1}:\Omega ^p(M)\rightarrow \Omega ^p(M)\)である。 ここで1つ余計に\(-1\)が出てきていることに注意。 計量が対角成分が全て\(+1\)の場合には\(\det g=1\)であったので\(n+1\)次元空間の場合には 双対の2乗が\((-1)^{p(n+1-p)}\)であるが、今は\(\det \eta =-1\)であるために\(-1\)が余分に 多く出てくることになる。 \(*\)を取る際には、第0成分の添え字を含む場合には\(\eta ^{00}=-1\)で添え字を挙げないように しておく。従って\(**=(-1)^{p(n-p)}\)となる。 \(\omega \in \Omega ^p(M)\)は
と書けるが、この\(\omega _1\)に対して\(n+1\)次元のホッジ作用素を作用させた時
となり、\(dt\w \omega _2\)に対して作用させれば(上式からも導かれるが)
となる。ここで右辺の\(-\)は、左辺で双対を取る際に添え字を上げる時の\(\eta ^{00}=-1\)から きている。
では電荷の保存則を復習しよう。 微視的に見れば電流は電子の流れである。即ち\(\v {i}=\rho \v {u}\)であることに注意 しよう。従ってカレント(1-formで書いて)\(J=\v {i}-\rho dt\)に対し
ここで\(d_4\)は時間と空間を合わせた4次元空間での外微分、\(\dagger \)は4次元空間でのホッジ作用素 である 44
。従ってポアンカレの補題 55 より、\(d_4\dagger F=\dagger J\)なる2-form \(\dagger F\)が存在するのであった 66 。さらに\(\dagger F\)を時間成分と 空間成分とに分けて、と置けば、
となるのであった。 以上のことと、前節のガウスの法則とアンペールの法則を見比べてみれば、 定常電流の場合(即ち物理量が時間\(t\)に依存しない場合)には、 (26)の\(\v {D}\)は電場\(\v {E}\)、\(\v {H}\)は磁場\(\v {B}\)と見なすことが出来そうである。 実際に真空中においてはこの対応は正しい。では物質中ではどうであろうか?物質中に 電荷\(e\)の荷電粒子が存在する場合、荷電粒子の周りの分子は荷電粒子の作る電場により分極する。 この分極した分子により新たに電場が生じる。従って単純に\(\mathrm {div}\v {E}=e\delta \)とは ならない。しかし上式から分かるように\(\mathrm {div}\v {D}=e\delta \)は満たされている。 この意味で\(\v {D}\)と\(\v {E}\)は区別される。\(\v {D}\)は電束密度と呼ばれる。 では磁場はどうであろう。一般に物質中には磁気双極子が存在する。これは物質中の電子の角運動量 やスピンに起因する。この磁気双極子の作る磁場によって(定常電流であっても) \(\mathrm {rot}\v {B}=\v {i}\)とはならない。 しかし、電束密度と同様に(定常電流の場合には)\(\mathrm {rot}\v {H}=\v {i}\)は満たされている。 従ってこれも磁場\(\v {B}\)と\(\v {H}\)は区別される。\(\v {H}\)は磁場の強さと呼ばれる。 以下では簡単のため特に断らない限り、真空中であるものとする。
ここで(26)の1段目の\(\pd _t*\v {D}\)の項を見てみる。これは電荷の保存則より 自然に導かれたアンペールの法則への補正項ということになる。この項は変位電流と 呼ばれる。変位電流を考慮した(今度は一般に時間に依存する)修正されたアンペールの法則
をアンペール-マクスウェルの法則という。
ファラデーの電磁誘導の法則
閉曲線\(C\)、及び\(C\)を境界に持つ曲面を\(S\)とする。この時、\(S\)を貫く磁束の時間変化率は \(C\)に生じる起電力(の逆符号)に等しい。即ち\(C\)は任意の閉曲線でよかったので
が得られる。これをファラデーの法則という。
モノポールの非存在性
電場が荷電粒子により生成されるように、磁場も磁荷を持った粒子が存在すれば同じように生成 される。また、磁極間に働く力は電場と同じクーロンの法則に従う。従ってガウスの法則と 全く同じ方程式が満たされることが分かる。 しかし、磁荷の場合には電荷と違い、磁気単極子(モノポール) が存在しないことが経験的に知られている。即ちとなる。
Maxwell方程式
以上の4つの法則(ガウスの法則、アンペールの法則、ファラデーの法則、モノポールの非存在)をまとめてMaxwell方程式という。 \(c=1\)の単位系を選ばなければ\(\pd _t\rightarrow \frac {1}{c}\pd _t\)及び\(\v {i}\rightarrow \frac {1}{c}\v {i}\)と置き換えればよい。
さて、Maxwell方程式の最初の2つは
を用いて、まとめて
と書けるのであった。ここで\(d_4F\)を計算してみよう。\(F=\v {E}\w dt+*\v {B}\)なので
となり、Maxwell方程式の残りの2つの組より\(d_4F=0\)が得られる。 従って時間と空間を含めた4次元空間で考えれば、Maxwell方程式は
とまとめて書くことが出来る。\(F\)を電磁場と呼ぶことにする。
電磁ポテンシャル
ここで前節の結果より、 \(d_4F=0\)なのでポアンカレの補題により、ある1-form \(A=\v {A}-\phi dt\)が存在し、 \(d_4A=F\)となる。 従ってが得られる。即ち
と表すことが出来る。\(A\)を電磁ポテンシャルといい、\(\v {A}\)をベクトル・ ポテンシャル、\(\phi \)をスカラー・ポテンシャルという。
Maxwell方程式は電磁ポテンシャルを用いれば
と書ける。ここで\(\delta _4=\dagger d_4\dagger \)は外微分\(d_4\)の双対作用素であるである (詳細は"トポロジー"note参照)。
ここで電磁ポテンシャル\(A\)の選び方には任意性がある。即ち電磁場は\(d_4A=F\)であるので、 任意の関数\(\chi \)に対して\(A_0=A+d_4\chi \)を用いても\(d_4A_0=F\)と書ける。 このように電磁ポテンシャルに\(d_4\chi \)のような項を加える変換を ゲージ変換という。即ち、ゲージ変換をしても記述される物理は変わらない。 この任意性を用いて、条件
を満たすように\(\chi \)を選ぶ。ここで\(\Box =d_4\delta _4+\delta _4d_4\)は4次元のラプラシアン (ダランベルシアンという)であり、\(\dagger \chi \)が4-formである ので\(\delta _4\chi =0\)である。容易に分かるように\(D=d_4+\delta _4\)と置けば、\(D^2=\Box \) である。このような\(A_0\)に対してはMaxwell方程式は
となり(\(d_4^2A_0=0\)は自明なのではずしておく)、さらに\(A_0\)には付加条件
が付け加わる。この条件は一般にゲージ変換を行えば満たされなくなる。即ち、このような 付加条件を加えることは、ゲージを固定することを意味する。ここで課したゲージ条件 をローレンツ条件といい、この条件を満たす電磁ポテンシャルをローレンツ ゲージにおける電磁ポテンシャルという。
電磁場中の電子の非相対論的記述
この章を終える前に、電磁場中での電子の非相対論的な運動の記述を簡単に行っておこう。 電磁場中での電子のニュートンの運動方程式(3) を与える電子のラグランジアン\(L\)は、ベクトル・ポテンシャル\(\v {A}\)および スカラー・ポテンシャル\(\phi \)を用いてで与えられる。実際にこのラグランジアンのオイラー・ラグランジュ方程式が(3) を与えることを確かめる。
に注意すると、
となり、運動方程式(3)式が得られる。
このラグランジアンのもと、正準運動量\(\v {p}_c\)は
となる。ただし\(\v {p}=m\dot {\v {x}}\)である。またハミルトニアン\(H\)は
となる。右辺\(2\)段目を見ると分かるように、 系のハミルトニアンはベクトル・ポテンシャルに依存しない。
ダランベルシアンの計算
さてここでダランベルシアンを具体的に表示してみよう。 計算はいくつかの方法が考えられる。ひとつめはベクトル解析の言葉で読み替えて計算する やり方。ふたつめはほとんど力技であるが、具体的に成分を書いて 地道に計算するやり方。みっつめはは時間成分と空間成分に分ける方法を応用して帰納的に 導くやり方。よっつめは以下で説明する。おそらくこの方法が最も一般的(\(n\)次元の場合 においても適用できる)で最も計算が少なくてすむ。従ってこの方法を取る。ここでは後のことを考慮して、一般的な擬リーマン多様体と考えて計算する。 "ゲージ理論"noteによれば、レビ・チビタ接続を\(\nabla ^{TM}\)とし、その時の 局所自明な(即ち\(\nabla ^{TM}e_i=0\))正規直交基\(e_i\)及びその双対基\(\theta ^i\)に対して、 外微分\(d\)及びその双対\(\delta \)は
と表されたことを思い出そう。 ここでクリフォード作用素を
で定義する。クリフォード作用素を使うと、\(D=d+\delta =c(\theta ^i)\nabla ^{TM^*}_{e_i}\) と書くことが出来る。 定義により\(\theta ^i\w \)も\(i_{\theta ^i}\)も外積代数に対して反可換に作用するので (当然だが\(\theta ^i\w \)と\(i_{\theta ^i}\)は反可換しない)、 容易に
であることを示すことが出来る。この関係はクリフォード代数と呼ばれる ("クリフォード代数"noteを参照)77
この関係から"トポロジー"noteで説明した超空間として見た時のド・ラーム複体と、 "クリフォード代数"noteで説明したスピノール束との類似が見て取れる。 即ち作用素\(D=d+\delta \)はド・ラーム複体上でのディラック作用素の一種の表現といえる。
となる。 ミンコフスキー時空の場合には大域的に接続が\(0\)なので、この表式は大域的に成り立つ。
波動方程式の一般解
以上により電磁ポテンシャルの満たすべき方程式(43)はと書ける。この方程式を非斉次波動方程式という。 さて、この節では手っ取り早くこの方程式の一般解を与えよう。 ここで形式的な解き方を紹介する。 簡単のためここでは、無限遠において\(\rightarrow 0\)である、物理的な ものだけを考える。 この場合には\(A_1\)及び\(A_2\)が共に上記波動方程式の解である場合には \(\varphi =A_1-A_2\)は
の解である。即ち(55)の解は(56)の解の不定性を除いて一意的に定まる。 この方程式は斉次波動方程式という。
以上を踏まえて、一般解は次のように与えられる。 ある関数\(G(x)\)及び1-form \(v(x)\ (x=(t,\v {x}))\)が存在して
を満たしたとすると、\(A\)は
として求まる。このような\(G(x)\)をグリーン関数という。 まずグリーン関数を求めよう。最も簡単な方法はフーリエ積分を使うことである。 即ち\(G(x)\)のフーリエ積分表示を
と置けば、フーリエ係数の関係式(\(k=(w,\v {k})\))
が得られる。しかしここで注意しなければならない。\(w^2=\v {k}^2\)のモードに関しては この関係式が満たされない。これは次のようにして理解するといい。 (57)の第一式を、\(\varepsilon >0\)として
と書き換え、このグリーン関数を求めて計算し、 最後に\(\varepsilon \rightarrow 0\)の極限を取ってやるとよい。 従って
より、グリーン関数は
と書ける。これをもう少し計算する。 まずは\(\v {k}\)積分を先に行おう。\(k=|\v {k}|\)と置けば \(\v {k}\v {x}=k|\v {x}|\cos \theta \)より
実変数\(k\)での積分を複素積分として考えると、poleの位置は 下図のようになる。
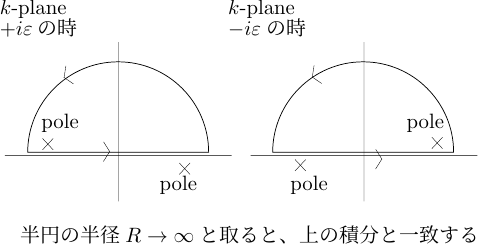
ここで複素積分の積分路を図のような半円に、向きを反時計周りに取る。 円の半径\(R\)に対して\(R\rightarrow \infty \) の極限を取れば円弧の部分の積分は\(\rightarrow 0\)となる。従って積分をこの半円周りの 積分に置き換えることが出来る。すると留数定理(コーシーの積分定理)を用いて計算し、 最終的に\(\varepsilon \rightarrow 0\)の極限を取れば
従って
ここで\(y^0=t\pm |\v {x}-\v {y}|\)と置いた。 ここでまだ\(v(x)\)の不定性が残っている。これをフーリエ積分表示しておこう。 \(v\)の満たすべき方程式\((\pd _t^2-\Delta )v=0\)より
が一般的な形である。ただし\(v\rightarrow 0\ (|\v {x}|\rightarrow \infty )\) であり、ローレンツ条件\(k_\mu a^\mu (\v {k})=0\)を満たしているとする。
ここまでは境界がない場合を考えたが、 ついでに境界がある場合に上記と同じようにグリーン関数を用いて 解を求める場合を考えておく。 考えるべき領域を\(D\)とし\(D\)の境界を \(S\)とする。 \(u,v\in \Omega ^p_{ph}(D)\)に対して\(\braket {u,v}=\int _Du\w *v\) と置けば、\(\alpha \in \Omega ^{p-1}_{ph}(D),\ \ \beta \in \Omega ^p_{ph}(D)\)に対して \(d(\alpha \w *\beta )=d\alpha \w *\beta -\alpha \w *\delta \beta \)より
に注意すれば
(\(D=d+\delta ,\ \Box =D^2=d\delta +\delta d\))と書ける。 従って電磁ポテンシャルとグリーン関数の満たすべき方程式は
なので、 \(u=G\)(\(G:y\rightarrow G(x,y)\)即ち\(x\)をパラメータとみなす)、\(v=A^\mu \)と置けば 電磁ポテンシャル\(A\)の成分の満たすべき条件として
を得る。ここで境界条件として次のものを考える。
の場合を考える この場合にはグリーン関数\(G\)に対して境界条件
を課すと、境界条件(73)を満たす解は
の形を取らないといけない。 ここで与えたタイプの境界条件(73)を ディリクレ型境界条件という。時にはグリーン関数に対する条件(74) を指す事もある。どちらであるかは文脈から読み取ってもらいたい。 従ってディリクレ型境界条件を満たす電磁ポテンシャルを求める問題は、ディリクレ型 境界条件を満たすグリーン関数を求める問題となる。 特に境界\(S\)上で\(0\)となるもの(\(u^\mu =0\))を考えれば、この場合にも 不定性として\((\pd _t^2-\Delta )v=0,\ v=0\ \mathrm {in}\ S\) なる1-form \(v\)の不定性があってもよくなる(このことは後で議論する)。 従って状況は上で考えた無限遠で\(0\) の場合と同じであり、解の形も同じになる。
一方で、境界条件
の場合を考えてみる。この場合にはグリーン関数\(G\)に対して境界条件
を課してやると、境界条件(76)を満たす解は
の形を取らないといけない。このタイプの境界条件(76)をノイマン型境界条件 という。これも上記同様にグリーン関数に対する条件(77)を指す事もある。 この場合にも\((\pd _t^2-\Delta )v=0,\ dv^\mu =0\ \mathrm {in}\ S\)なる1-form \(v\)の不定性 があってもよい。
次に電流も電荷密度も共に\(0\)の場合、即ち\(J=0\)(斉次波動方程式の解)の場合 には電磁ポテンシャルの表式 (72)より
を得る。従ってこの場合には境界条件として\(S\)上の0-form(関数)\(u^\mu \)と1-form \(v^\mu \) として
が与えられれば、電磁ポテンシャルの形は
で与えられる。やはりこの場合にも斉次解の不定性があってもよい。
上記境界値問題の解の不定性について考えてみよう。 まず、ミンコフスキー空間ではなくユークリッド空間の場合から考える。 ユークリッド空間の場合にはラプラシアンは\(\Box =d\delta +\delta d=-\Delta \) で与えられることに注意されたい。この時
をラプラス方程式といい、その解を調和関数という。
補題 .1 一般的にいって \(n\)次元ユークリッド空間の場合の\(\Omega ^0(D)\)上のディリクレ型境界値問題
(\(\Box =d\delta +\delta d\))に対して、 \(D\simeq D^n\)(\(D^n\)は\(n\)次元球体)の場合には 88
ここでは考えやすいようにこのように設定しているが、実際には\(D\)がコンパクトであればよい。 コンパクトな領域\(D\)上の連続な関数\(f\)が上限を持たないと仮定する。仮定により \(f>c_1\)なる領域が存在する。それを\(A_1\)とする。\(c_1<c_2\)とし、\(f>c_2\)なる領域を\(A_2\) とする。同様にして\(c_1<c_2<\cdots <c_n<\cdots \)で\(c_n\rightarrow \infty \)となるように \(c_n\)を取っていく。対応する領域は\(A_1\supset A_2\supset \cdots \supset A_n\supset \cdots \) となる。\(\lim _{n\rightarrow \infty }A_n=A\)と置く。 さらに各\(A_n\)から点\(a_n\)を選んでいけば、点列\(\{a_n\}\)は\(D\)のコンパクト性により \(a=\lim _{n\rightarrow \infty }a_n\in D\)である。従って\(D\supset A\neq \emptyset \)。 しかし\(A\)の作り方から、\(a\in A\)に対して\(f(a)\)は有限の値を 取り得ない。従って\(f\)には上限が存在する。\(f\)の連続性により、その値が最大値である。 最小値も同様である。
さらに言えば、実際には\(D\)はコンパクトである必要性もない。その場合には任意の正の数 \(\varepsilon \)に対して、\(|\varphi |\geq \varepsilon \)なる領域\(D_\varepsilon \)でコンパクトである ものが取れればよい。
証明 : 証明は簡単である。仮に\(\varphi \neq 0\)であるとすると、\(D\)内に\(\varphi \) は最小点と最大点を持ち(即ちその点で\(\varphi \)は最小値、もしくは最大値を取る)、 そのどちらかは\(D\)の内部(\(\overset {\circ }{D}\))に存在する。その点を\(p\)とする。 ここでは\(p\)が最小点と仮定する。 \(p\)の十分近傍の2点\(p_1,p_2\)では \(\Delta \v {x}=p_2-p_1\)と置けば、
となるので、\(p_1\)から見て\(p_2\)が\(p\)とは反対方向の点である場合には上式 左辺は\(>0\)となる。従って \(d\varphi \)は\(p\)の近傍において\(p\)とは反対向きのベクトルとなる。以上を踏まえると \(p\)を含む適当な半径\(\varepsilon \)の 球を\(U\)(\(\subset \overset {\circ }{D}\))とすると、
一方で\(d*d\varphi =*\Delta \varphi =0\)なので、これは矛盾である。従って\(\varphi =0\)である。■
従って上記ディリクレ問題はユークリッド空間の場合には不定性はなく、一意的に定まる ことが分かる。また、 この証明を追えばミンコフスキー空間の場合にはこの補題が成り立たないことが 分かる。即ち\(U\)の内部において\(d\varphi \)が\(p\)と反対方向ベクトルであっても 計量が不定値であるために、\(*d\varphi \)が\(U\)の外向きベクトルとはならないからである。 ミンコフスキー空間におけるこのラプラス方程式の境界値問題の非自明解の存在は、 固定端のある場合においての波動関数の存在に対応していることが分かる。 また線形代数の概念で言えば、ユークリッド空間の場合にはラプラシアンが単射写像であるのに 対して、ミンコフスキー空間の場合には単射ではないということを意味している。
同様のことはノイマン型境界条件に対しても同じことが言える。即ち
補題 .2 \(n\)次元ユークリッド空間の場合の\(\Omega ^0(D)\)上のノイマン型境界値問題
に対して、\(D\simeq D^n\)の場合には、これらの条件を満たすものは\(\varphi =定数\)のみである。
証明 : 証明はディリクレ型とほぼ同様である。\(\varphi \)が定数でないとする。 \(S\)上で\(d\varphi =0\)なので\(S\)上では定数である。 従って\(\varphi \)の最大値もしくは最小値のどちらかは必ず\(D\)の内点に存在する。 後はディリクレ型の時と同じで矛盾が導ける。従って定数でないといけない。■
この場合にもやはりミンコフスキー空間の場合には成り立たない。
ここまでのことを定理としてまとめておこう。
定理 .1 \(n\)次元ユークリッド空間におけるポアソン方程式のディリクレ型境界値問題
の一般解は一意的に定まる。またノイマン型境界値問題 (\(d\varphi =v\ \mathrm {in}\ S\))の場合は定数の付加項を除いて 一意的に定まる。またミンコフスキー空間の場合には非斉次波動方程式のディリクレ型境界値問題
の一般解は斉次方程式の解の不定性を除けば一意的に決まる。ノイマン型境界値問題の場合には 定数項と斉次方程式の解の不定性を除き一意的に決まる。 この時どちらの場合も、 不定性である斉次方程式の解の境界値条件は\(=0\ \mathrm {in}\ S\)である。
上記の補題の証明から分かるように、ユークリッド空間の場合には コンパクト領域\(D\)内で定義された調和関数は\(D\)内に極大、極小値を持たないことが分かる。 また最大、最小値は常に\(D\)の境界\(S\)上に存在する。 ついでに言えば、これまでのことは\(D=\mathbb {R}^n\)の場合でも、境界\(S\)(この場合には境界 が存在しないので)での条件 のかわりに無限遠における条件としてとして置き換えればそのまま成り立つ。
以上の定理の簡単な応用をひとつ挙げておく。 後に述べるように静電場の場合、金属中のスカラー・ポテンシャルは\(\phi =一定\)となる。 従って周囲を金属の壁で完全に覆ってしまい、中身に電荷を持つものが存在しなければ スカラー・ポテンシャルはディリクレ型境界値条件を満たすラプラス方程式の解と ならなければならず、従って壁の中には電場は一切存在しないことになる。 この現象を静電遮蔽という。
最後に電場と磁場の満たすべき方程式を書いておこう。\(\Box d_4A=d_4J\)より直ちに
を得る。
ローレンツ対称性
さてここまで一貫して計量(16)を持った平坦(flat)な空間の幾何学の言葉で 記述してきた。これには理由がある。即ちMaxwell理論が慣性系の取り方に全く依存しないことが 分かっているからである。即ち任意の慣性系においてその系での電場と磁場が与えられれば、その系の 直交座標系でMaxwell方程式を表せば、慣性系の取り方によらず 全く同じ方程式を満たしているという事実がある。 即ちどの慣性系で電磁気現象を観測しても、それらはその系での直交座標系を用いれば 同じMaxwell方程式に従っている。 これは数学的に表現すれば、理論が任意の慣性系間の座標変換のもと共変 1010共変性という概念は専ら数学的なものである。任意に系をひとつ選び、個々の物理量が与えられれば それらの間の関係や法則が同じ微分方程式なりで記述されるという意味である。 この意味において不変性とは異なる。不変という時は通常、全く同じになるという意味であり、 座標系のとり方に全く依存しない量という意味である。
で与えられる。 ガリレイ変換のより一般的な形は
で与えられる。ここで\(A=(a_{ij})_{ij}\)は\(SO(3)\)の元である。 このガリレイ変換全体が群をなすのを見るのは容易であろう。 明らかにニュートンの運動方程式
に対してガリレイ変換\(\frac {d^2\acute {\v {x}}}{dt^2}=A\frac {d^2\v {x}}{dt^2}\)、 \(\acute {\v {F}}=A\v {F}\)した後は
である。この関係によりニュートンの運動方程式は一般的にガリレイ変換のもと共変であることが 明らかである。一方、Maxwell理論はこの変換のもと共変ではない。 それを見る最も簡潔な方法はMaxwell理論の持つ空間対称性の群を決定してしまうことである。 ガリレイ変換がその群に含まれないことが分かればよいからである。 さてMaxwell理論の持つ対称性を見つける最も簡単な方法は何であるか。 注意深い読者にとっては簡単な問題であろう。なぜならMaxwell理論が計量(16) で与えられるミンコフスキー空間上での幾何学の言葉で表されているからである。 実際に前節より真空中の電磁ポテンシャルの満たす波動方程式が
であることを見た。この方程式の持つ対称性を見つけることは、ちょうど計量(17) を不変に保つ座標変換を見つけることに等しい。 Maxwell理論の持つ対称性の群の元を\(\Lambda =(\Lambda ^\mu _{\ \nu })^\mu _{\ \nu }\) (行列)と書けば、
即ち
が群を特徴づける条件となることが分かる。この条件を満たす座標変換がローレンツ変換である。 ローレンツ変換全体は群を成すことは容易に分かると思う。 ローレンツ変換全体からなる群 をローレンツ群という。上で与えたガリレイ変換(92)がこの条件を満たさないことを見るのは容易であろう。 ではローレンツ群の一般的な形を決定してみよう。 まず恒等写像\(1\)は明らかに条件(97)を満たす。\(1\)から連続的に変形して出来るローレンツ群 の元\(\Lambda \)は\(\Lambda =\exp (\lambda M)\)(\(M\)は\(4\times 4\)行列)と書けば、 (97)に代入し、\(\lambda \)で微分して\(\lambda =0\)と置けば
を満たす。即ち\(\eta M\)は\(SO(4)\)の生成子からなるリー代数\(\mathfrak {so}(4)\)の元に等しい。 逆に\(\mathfrak {so}(4)\)の元\(\eta M\)に対して\(\Lambda =\exp (\lambda M)\)はこの条件を満たす。 このような形で表されるローレンツ群の元を\(SO(1,3)\)と書き、固有順次ローレンツ群 という。通常ローレンツ群という時、特に断らなけれは固有順次ローレンツ群を指す場合 が多い。さて\(\mathfrak {so}(4)\)は明らかに実係数ベクトル空間と見なすことが出来るが、 基底は\(M^t=-M\)(反対称行列)を満たす\(4\times 4\)行列なので\(6\)個存在する。 従って\(SO(1,3)\)の生成子からなるリー代数\(\mathfrak {so}(1,3)\)も同様に\(6\)次元である。 基底は以下の通りである。
\(\v {J}=(J^1,J^2,J^3)\)は空間の回転の生成子である。\(\v {K}=(K^1,K^2,K^3)\)はブースト と呼ばれ、異なる慣性系間の間の変換の生成子である。 簡単にブースト\(K^1\)により生成される変換を計算してみよう。
(各成分は\(2\times 2\)行列)より
と書ける。ここで\(\cosh ^2\theta -\sinh ^2\theta =1\)より\(\beta =\frac {\sinh \theta }{\cosh \theta }\) と置けば\(-1<\beta <1\)であり、 \(\cosh \theta =\frac {1}{\sqrt {1-\beta ^2}}\) 及び\(\sinh \theta =\frac {\beta }{\sqrt {1-\beta ^2}}\)と書ける。従って最終的に
と表される。この変換のもと座標は
と変換する。 これは\(\beta \)が十分に小さく\(\beta ^2\)が無視できると時には
となる。また(104)の逆変換は\(\exp (-\theta K_1)\)であり、従って \(\beta \)を\(-\beta \)に置き換えれば逆変換が得られることが分かる。 さて、今は光速を\(c=1\)と取っているが、あらわに\(c\)を書けば、次元解析により\(dt\)を\(cdt\) に置き換えればよいことが分かる。\(c\beta =v\)を相対速度と解釈し、相対速度\(v\)が光速より 十分小さく\(\beta ^2=(v/c)^2\)を無視することが出来るならば、 ガリレイ変換(91) と一致することが分かる(\(v\)でなく\(-v\)となることは本質的なことではない)。 以上のようにローレンツ変換は、速度が光速より十分小さい場合に近似的にガリレイ変換を再現 する。従ってローレンツ変換による共変性を持った力学(相対論)は速度が光速より十分小さい 場合には近似的にガリレイ変換による共変性を持った力学(ニュートン力学)を再現する のである。ここで注目すべきは、\(-1<\beta <1\)から分かるように 相対速度が\(|v|<c\)の慣性系からはどのように固有順次ローレンツ変換 を行っても相対速度が光速\(c\)より大きい系へ移ることが出来ないということである。
残りの\(1\)から連続的に変形できないローレンツ群は
がある。 \(\mathcal {T}\)は時間反転。\(\mathcal {P}\)は空間反転と呼ばれる。 残りは空間成分同士の入れ替えがあるが、これは空間反転と適当な\(SO(3)\)の元により作ることが出来る。 以上のものにより生成される群がローレンツ群である。 これらローレンツ群ではガリレイ変換を表すことが出来ないことは 容易に分かると思う。 従ってMaxwell理論にはガリレイ変換のもとでの共変性を持っていないことが分かる。 ニュートン力学とMaxwell理論は異なる座標変換群により共変性を実現している。 Einsteinは力学を、Maxwell理論の持つ共変性を実現するように修正した。 それが特殊相対性理論である。 特殊相対性理論については後に説明する。
電磁場の力学
電磁場のラグランジアン
ここまでで、電磁場の満たすべき一般的な方程式、及びその一般解を求めた。 また前節ではそれらの持つ時空の対称性について議論した。 ここではそれらをもとに、電磁場のラグランジアンを与えよう。 指針としては力学と同じく、ラグランジアン\(L\)が与えられれば、 それからオイラー・ラグランジュ方程式 により電磁場の基礎方程式、即ちMaxwell方程式(35)、(36) が得られるように構成されるべきである。 またそれは慣性座標系の選び方に依存しない共変なものでないといけない。 また、Maxwell理論の持つもうひとつの対称性である「ゲージ対称性」も持ってないといけない。 それらの対称性を持ったラグランジアンでなければ、得られる基礎方程式ももちろんそれらの 対称性を持ち得ないからである。 ゲージ対称性を持ったラグランジアンを構成する最も素直な方法は電磁場\(F\)を用いてラグランジアン を構成することであろう。またこれは2-formであるので、ラグランジアンは\(F\) 2つの積の形で 書けるようなものがよいであろう。ローレンツ共変性を満たすようなものを構成する最も 素直な方法は微分形式の言葉で、座標系のとり方によらない表示で表すことであろう。 従って候補としてが挙げられる。このどちらか(の定数倍)からMaxwell方程式が得られればよい。 結論を先に出せば、電磁場の場合には\(F=d_4A\)と置き、
を考えればよい。ここで\(\mathcal {L}_M\)はラグランジアン密度と呼ばれる。 \(S_M\)は作用(もしくは作用積分とかラグランジアンとか呼ばれる)である。 実際、\(F=d_4A\)に注意して、ラグランジアン密度の\(A\)の変分\(\delta A\)を取れば
従って境界\(S\)上での\(A\)を固定した上での、この変分に対して作用が停留するという条件 \(\delta S_M=0\)より
となり、カレントのない場合のMaxwell方程式の第一式(35)を再現する。 カレントがある場合にはラグランジアン密度に付加項
が付く。この項を加えた上で変分を取ってやれば、
とカレントのある場合のMaxwell方程式 (35)を得ることが出来る。 残りの(36)は\(F=d_4A\)より自明である。
最後にラグランジアンを電場と磁場を用いて具体的に表しておく。電磁場\(F\)は
と書ける。 少し計算すれば、これはローレンツ変換(104)のもとで
と変換するのが分かる。これは一般的な形でまとめて書くと
と書ける(\(c=1\)にとらなければ\(dt\rightarrow cdt\)及び\(\v {v}\rightarrow \frac {\v {v}}{c}\) と置き換えてやればよい)。 ラグランジアン密度は
と表される。これはもちろんローレンツ変換のもと不変である。
電磁場のエネルギーと運動量
電磁場のラグランジアンが得られたので、解析力学に習えば電磁場のエネルギーと 運動量が定義出来る。 "解析力学"noteによれば、保存則と対称性とは密接な関係があった。 運動量保存則は空間成分の変分により得られ、エネルギー保存則は時間成分の変分により得られる。 電磁場のラグランジアンからこれらの変分により保存量を求めよう。 ラグランジアン密度を\(x^\mu \)での変分を取ると(2段目の等式は電磁場のオイラー・ラグランジュ方程式=Maxwell方程式による)従って
と書けるので、
と置けば、保存則
が得られる。\(T^\mu _{\ \nu }\)を電磁場のエネルギー・運動量テンソルという。
では具体的に電磁場のエネルギー・運動量テンソルを求めてみよう。
従って
を得る。さらにこのテンソルを対称にするために
の項を付け加える。Maxwell方程式により\(-\pd _\rho A_\mu F^{\nu \rho } =-\pd _\rho (A_\mu F^{\nu \rho })\)となるので、電磁場が無限遠方で\(0\)となるならば、エネルギー・ 運動量テンソルにこの項を付け加えてもよい。 こうして対称なエネルギー・運動量テンソル
を得る。具体的に成分を書き下すと
となる。 \(\mathcal {E}\)は電磁場のエネルギー密度、 \(\v {S}=\v {E}\times \v {B}\)はポインティング・ ベクトル(運動量密度)、\(\sigma ^{ij}\)はMaxwellの応力テンソルと呼ばれる。 カレントがない場合の エネルギー保存則は\(\pd _t\mathcal {E}+\mathrm {div}\v {S}=0\)、 また\(\sigma ^i=(\sigma ^{1i},\sigma ^{2i}, \sigma ^{3i})\)と置けば、運動量保存則は\(\pd _tS^i+\mathrm {div}\sigma ^i=0\)と書ける。 これら電磁場のエネルギー・運動量テンソルの保存則に関する詳しい説明は 「特殊相対性理論」の章の 「連続的に分布する物質の相対論的運動」の節で行う。
平面波への分解
\(A_0=0\)なる条件を満たすゲージを軸性ゲージという。 ローレンツゲージにおける電磁ポテンシャルに対して、さらに適当なゲージ変換を行うことにより、 ローレンツ条件を満たしたまま軸性ゲージを取ることが出来る。 実際、\(\delta _4 d_4\chi =0\)及び\(\pd _t\chi =\phi \)なる\(\chi \)でゲージ変換を行えば ローレンツ条件を満たしたまま、\(A_0=0\)と取ることが出来る。 結果としてゲージ条件\(\mathrm {div}\v {A}=0\)が得られる。このゲージを クーロンゲージという。ここでカレントのない場合の電磁ポテンシャルの満たす斉次波動方程式の平面波解 (ひとつのフーリエモードからなる解)の場合を考える。 即ちベクトル・ポテンシャルが
の場合である(一般解はこの形の平面波解の重ね合わせである)。 \(k^\mu =(\v {k},w)\)は条件\(k^2=0\ (\v {k}^2=w^2)\)を満たしている。 クーロンゲージの場合には\(\v {a}\)と\(\v {k}\)との間に条件
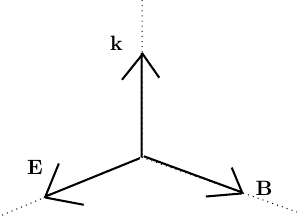
が成り立っている。 この時、電場と磁場はそれぞれ
で与えられる。以上より、平面波の進む方向ベクトル\(\v {k}\)と電場\(\v {E}\)と磁場\(\v {B}\)との 関係は下図のようになることが分かる。
さてここで電磁場の運動量密度であるポインティング・ベクトル、及びエネルギー密度を フーリエモードを用いて計算してみよう。 まずベクトル・ポテンシャルは上記平面波の重ね合わせ
で表される(電場と磁場が、従って電磁ポテンシャルが実数でないといけないのでこのような 形になる)。従って 電場、磁場の一般解は
で与えられる。
空間全体の電磁場のエネルギー\(E=\int d^3\v {x}\mathcal {E}\)は
に注意すれば
となる。 ここでまず\(\v {x}\)での積分を行うと、波数ベクトル\(\v {k}\)に関するデルタ関数が生じる。 それから\(\acute {\v {k}}\)での積分を行えば\(\acute {\v {k}}\)の積分変数が消去できて \(\v {k}\)の積分だけ残る。 さらに\(\v {k}\cdot \v {a}(\v {k})=\v {k}\cdot \v {a}^*(\v {k})=0\)より 波数ベクトル\(\v {k}\)と\(\v {a}\)の内積からなる項は全て\(0\)となる。 また\(\v {k}^2=w^2\)に注意すれば\(t\)に依存する項は全て相殺されて消えてしまう。 従って時空の成分での積分を行えば
と簡単に書ける。同様に空間全体の電磁場の運動量は
となる。ここで2段目の\(\cdots \)は\(\v {a}\v {a}\)や\(\v {a}^*\v {a}^*\)の形の項を省略している。 これらの項は\(\v {x}\)積分を行った後\(\v {k}\)を先にするか\(\acute {\v {k}}\)を先にするかで 結果が\(-1\)倍違って出てくるが、これらは等しくないといけないので\(0\)である。 また2段目から3段目の計算では\(\v {a}\times (\v {b}\times \v {c})=\v {b}(\v {a}\cdot \v {c}) -\v {c}(\v {a}\cdot \v {b})\)を用いている。 この結果を見れば、電磁場のエネルギーは電磁場の振動数\(w\)と振幅の2乗との積の重ね合わせ であり、運動量は波数ベクトルと振幅の2乗との積の重ね合わせであることが分かる。
ここで量子論的な見方を少しだけ書いておくと、電磁波も量子化すると光子と呼ばれる 粒子と波の性質を持った量子として扱われる。 \(|\v {a}(\v {k})|^2\)は波数ベクトルが\(\v {k}\)の光子の個数を表す。 波数ベクトルが\(\v {k}\)の各光子の持つエネルギーと運動量はプランク定数\(\hbar \) を用いてそれぞれ\(\hbar w\)及び\(\hbar \v {k}\)と表される。 即ち上で求めた電磁場のエネルギーと運動量は、全ての光子についての各光子のエネルギー と運動量の和(積分)そのものである。
電磁波の放射
カレントのある場合の電磁ポテンシャルは 非斉次波動方程式(55)の(斉次項の不定性を除いた)一般解により与えられた。ここで位置\(\v {x}_e\)にある電荷\(e\)の1つの点電荷が速度 \(\dot {\v {x}}_e=\v {v}(t)\)で 1212
点電荷の速度に関して。 速度ベクトル場\(\v {v}(\v {x},t)\)に沿って運動している場合として考えても、 点電荷の速度は\(\v {v}(\v {x}_e,t)\)で与えられるので、実質的に\(t\)のみの関数なので、簡単に \(\v {v}(t)\)と表記にしている。
で与えられる場合を考えよう。この場合には電磁ポテンシャルは
となる。 ここで\(A(x)\)の中の\(y^0\)は\(y^0=t\pm |\v {x}-\v {x}_e|\)であり、\(\v {x}_e=\v {x}_e(y^0)\)である。 一般的に
であるので、
となる。ここで\(t^0\)は\(y^0=t\pm |\v {x}-\v {x}_e(y^0)|\)を満たす\(y^0\)である。 ここで現れる\(\pm \)の符号の意味について。\(-\)の場合は\(y^0=x^0-|\v {x}-\v {x}_e|\)である。 光速を\(1\)と取らずに\(c\)と書いておけば\(y^0=x^0-\frac {|\v {x}-\v {x}_e|}{c}\)、即ち点電荷 の位置\(\v {x}_e\)から位置\(\v {x}\)まで光が移動した時間を現在の時刻\(x^0\)から差し引いた時刻 に等しい。言い換えれば、時刻\(x^0\)、位置\(\v {x}\)に到着した電磁波が放射された瞬間の時刻 である。\(+\)符号はその逆である。時刻\(y^0\)に点電荷で吸収または散乱される電磁波が、 位置\(\v {x}\)に放射された時刻と解釈できる。 ここではそのどちらでもよいので、どちらかを選ばずに計算を続ける。 \(t^0\)の関数の \(\v {x}\)に関する微分は\(t^0=t\pm |\v {x}-\v {x}_e(t^0)|\)より\(t^0\)に関する微分で 書くことが出来る。よって\(\sim \frac {1}{|\v {x}-\v {x}_e|}\)のorderでは
及びこのorderでは\(-\nabla \phi \sim 0\)。 従って
で与えられる。 同様にして磁場に関しては、\(f(t^0,\v {x})=t^0-t\mp |\v {x}-\v {x}_e(t^0)|\)と置けば \(0=df=\frac {\pd f}{\pd t^0}dt^0+\frac {\pd f}{\pd \v {x}}d\v {x}\)より
より
となる。以上の結果は煩雑なので、\(\v {v}(t^0)\)のorderが十分小さく、 \(|\v {x}-\v {x}_e(t^0)|\)が十分 大きいと仮定して少しだけ簡略化しよう。この近似のもと電場と磁場は
と簡単になる。
従ってポインティング・ベクトルは
さてここでこの式の意味を考えよう。 括弧の中のベクトルは時刻\(t^0\)での点電荷の位置から位置\(\v {x}\)への方向ベクトルから、 点電荷の加速度ベクトル方向成分を差し引いたものに等しい。 従って加速度ベクトル\(\dot {\v {v}}(t^0)\)と直交する。 \(\dot {\v {v}}(t^0)\)と\(\v {x}-\v {x}_e(t^0)\)との成す角を\(\theta \)と置けば
と書ける。従って電磁波は点電荷の加速度と垂直方向が最も強く、平行方向付近が最も弱く完全 に平行な方向だと\(0\)である。また放射される電磁波の強さは点電荷の加速度の大きさの2乗に 比例する。また点電荷からの距離の2乗に反比例する。
さて、単位時間当たりに放射される電磁波の全運動量を計算しよう。 計算が最も簡単になるのは、中心を\(\v {x}_e(t^0)\)に取り、半径\(|\v {x}-\v {x}_e(t^0)|\)の 球面\(S\)上でポインティング・ベクトルを面積分するのがよい。 座標系を極座標にとり、角度を\(\dot {\v {v}}(t^0)\)を基準軸 (\(0\leq \theta \leq \pi \)、\(0\leq \phi \leq 2\pi \))に選べば、 簡単な計算で\(\int ^\pi _0\sin ^3\theta d\theta =\frac {4}{3}\)が分かるので、
となるのが分かる。 一方球面\(S\)で囲まれる領域を\(D\)と置けば、\(\pd _t\mathcal {E}+\mathrm {div}\v {S}=0\)より (\(D\)の中心\(\v {x}_e(t^0)\)は時間変化するので、\(D\)も移動していくが、その体積は変わらない ので)
即ち\(S\)から単位時間当たりに放射される電磁波の全運動量は、 \(D\)内の全エネルギーの時間変化に等しいことが分かる。 またこの結果から古典的な原子の模型、即ち原子核の周りを電子が周回しているという描像 は正しくないことが分かる。もしその描像が成り立つならば、電子は円運動していることになり、 電子から加速度の2乗に比例したエネルギーが放出されることになる。 従って電子は原子核に落ち込んでしまう。即ち原子は安定に存在しえないことになるのである。 原子の正しい描像は量子論によって初めて得ることが出来る。 それにも関わらず、以下の節では古典的な円運動として扱うことがある。 それはこの描像によって考察しても、量子論によって得られる結果を近似的に再現することが 分かっているからである。 即ち電子から放射される電磁波を考慮しなければ、古典的な原子模型の描像である程度 間に合うということを表している。
物質中の電磁波
誘電率
この章では、絶縁体中に電磁波が進入してきた時の物質中での電磁場の振る舞いについて 簡単に説明する。物質は分子により構成されている。 それら分子は簡単なモデルを考えれば、陽子の周りを電子が周回しているということになる。 ここに電磁波が照射された時、分子内の陽子と電子が電磁力を受け、分子内に電荷密度の 偏りが生じる。これを分極という。この分極により新たに電磁場が生成される。 結果として、一般的に全電磁場は照射されたもとの電磁場とは異なるものとなると考えられる。 従って巨視的な意味では、電場や磁場を用いたガウスの法則やアンペールの法則はそのままでは 成立しない。電場や磁場の変わりに電束密度\(\v {D}\)や磁場の強さ\(\v {H}\)を用いる必要がある。 これらは実質的には分子内の分極等による寄与を考慮しない量とも見なせる。 電束密度も磁場の強さも通常は、電場や磁場との一定の関係を見出すことが出来る。 以下では簡単にそれらについて説明する。 なお、以上の分極に関する観点は完全に古典的なものであることを念頭に置いておく必要がある。 完全な理解は量子論的な理解が必要になる。しかしそれはこのnoteの趣旨から大きく外れるので ここではこれ以上は触れない。
双極モーメントが一様に分布している場合
分子内で分極が存在する場合の簡単なモデルを考えてみよう。 位置\(\v {y}\)及び\(\v {y}+\v {a}\)に電荷\(-e\)、\(e\)の点電荷が存在する場合の スカラー・ポテンシャルはで与えられる。ここで\(\v {a}=\varepsilon \v {e}\)(\(\v {e}\)は単位ベクトル、\(\varepsilon \ll 1\) とする)の場合には
と書ける。ここで\(\v {p}:=e\v {a}\)と置き、これを電気双極子モーメントと呼ぶ。
さて、今十分に広い領域\(D\)内に格子状に同じ 電気双極子モーメントが敷き詰められている場合を 考える。\(D\)内の格子点の数を\(N\)、体積を\(V\)とし、格子点に囲まれる最小の立方体の 体積を\(\alpha \varepsilon \)とすれば
なる関係があるのが分かる。個数密度は\(\frac {N}{V}\)である。 巨視的な意味での電気双極子モーメントは単位体積当たりの電気双極子モーメントであり、 \(\v {P}=\v {p}\frac {N}{V}=\frac {e}{\alpha }\v {e}\)である。 従って、この時全ての電気双極子モーメントにより生成されるスカラー・ ポテンシャルは、
で与えられる。従ってこれら電気双極子モーメントにより生成される静電場は、
と書ける。ここで右辺一段目のカッコ内の最初の項は\(D\)が十分に広いので 打ち消しあうものとした。さらに\(D\)が円形とし、その半径が十分に広く、 原点を\(\v {x}\)に置き換えても近似的に\(D\)が円形と見なせるとするならば、 \(D\)の半径を\(r\)とすると
となる。即ち電場は電気双極子モーメントの方向\(\v {e}\)と平行になる。 またこの式から分かることは、双極子の正と負の電荷間の距離が最小格子体積と比べ小さすぎる 場合には\(\alpha \gg 1\)となり、電気双極子全体により生成される電場は無視できることになる。 これは直感的には明らかだと思う。
双極モーメントが一般的な分布をしている場合
今度は各格子点ごとに双極子モーメントが異なる配置をしているとする。 これは例えば誘電体と呼ばれる物質(の一例)中の分子配置の簡単な古典的モデルと 見なすことが出来る。 前節同様に微視的な意味での電気双極子モーメントが\(\v {p}_i=e\v {a}_i=e\varepsilon \v {e}_i\) で与えられている場合を考える。ここで\(\v {e}_i\)はもはや単位ベクトルとは限らない。また 添え字の\(i\)は各格子点を区別するためのものである。 巨視的な意味での電気双極子モーメント\(\v {P}(\v {x})\)を得るには、巨視的な意味で格子点の分布が 近似的に連続的であると見なせる程度の範囲の領域\(\Delta \ (\ni \v {x})\) 内での電気双極子モーメントの平均\(\braket {\v {p}}\)が必要である。 格子点の個数密度を\(n\)とすると、 領域\(\Delta \)内(体積\(\Delta v=\varepsilon \alpha \)とする)に対しての平均はである。巨視的な意味での双極子モーメント\(\v {P}\)は\(\v {P}=n\braket {\v {p}}\)で与えられ、 座標の連続的な関数であると見なせる。 巨視的な意味でのひとつの双極子モーメントから生成されるスカラー・ポテンシャルは
従って全ての双極子モーメントを考慮した場合には
ここで\(\pd D\)上で\(\v {P}=0\)であるとするならば、
となる。これとカレントにより生成される電磁ポテンシャルの表式(66) と見比べると、電気双極子モーメントが存在する場合には電荷密度
が存在すると見なして計算すればよいことが分かる。
電束密度
前節で説明したように、電気双極子モーメントが存在する場合には全電荷密度には、存在する 自由荷電粒子以外に、双極子モーメントからの寄与がある。 通常我々が直接観測することが出来るのは(意義はあるかもしれないが)自由荷電粒子のみである。 従って巨視的な意味では電荷密度は自由荷電粒子のみを換算するように定義するのが便利である。 そのような場合には、観測される電場\(\v {E}\)はもはや\(d*\v {E}=*\rho \)を満たさない。 「アンペールの法則」の節で説明したように、その場合には通常電束密度\(\v {D}\)を、 ガウスの法則\(d*\v {D}=*\rho \)を満たすように定義する。 さて、系の電場は系に存在する自由荷電粒子と電気双極子モーメントにより生成される 電場の和である。 従って電場\(\v {E}\)にガウスの法則を適用した場合、 換算される電荷密度は自由荷電粒子と電気双極子 モーメントの和\(\rho _{total}=\rho +\rho _e\)である。即ち\(d*\v {E}=d*\v {D}-d*\v {P}\)の関係式 が成り立つ。このことから簡単な関係式ある1-vector \(\v {K}\)に対して\(*d\v {K}\)の形の不定性が残るが、これは本質的なことでは ないと思われるので無視した。実質的には電束密度\(\v {D}\)はその発散が電荷密度を与えるもの というくらいの意味しかないからである。
通常は電場と電気双極子モーメントとの間には一定の関係が存在する。 外部電場の存在する空間に誘電体を置いた場合、誘電体中の各電気双極子モーメントのベクトルは 外部電場と向きをそろえる。電気双極子モーメントにより生成される電場の影響で電気 双極子モーメントはさらに向きを変えるであろう。 そのようにして双極子モーメント自身による影響で向きを変えていく。 平衡状態に達したとき、外部電場と電気 双極子モーメントにより生成される電場とを重ね合わせた全電場\(\v {E}\)と、電気双極子モーメント とは完全に同じ向きを向くであろう。従って電気双極子モーメント\(\v {P}\)と全電場\(\v {E}\)とは 比例し、
と書けると仮定できる。この比例定数\(\chi \)を電気比感受率と呼ぶ。 また\(\varepsilon =1+\chi \)を誘電率と呼ぶ 1414
真空中での誘電率\(\varepsilon _0\)を\(\varepsilon _0=1\)ととらなかった場合には、 誘電率は\(\varepsilon =\varepsilon _0(1+\chi )\)となる。この場合には\(1+\chi \)を 比誘電率と呼ぶ。今は真空中の誘電率を\(1\)と取っているので、誘電率と比誘電率 とは区別する必要がない。
と書ける。誘電率は物質の不均一さにより座標に依存したり、電場の各モードの振動数に依存したり する。実際には、以上のことは必ずしも一般的に成り立つとは限らない。 場合によっては電気比感受率が負であったり、 場合によっては一般的なテンソル(\(3\times 3\)行列)の形を取ることもある。 しかしここではこれ以上触れることはしない。
透磁率
この節では定常的な磁気現象を考えよう。磁気モーメント
ある領域\(D\)内に 電流\(\v {i}\)が与えられた時、電流により生成されるベクトル・ポテンシャルはであった。ここで\(y^0=t-|\v {x}-\v {y}|\)である。今位置\(\v {x}\)が領域\(D\)から十分に離れた位置 であるとすると、
ここで\(t^0=t-|\v {x}|\)である。ここで右辺第一項を計算しよう。 \(\v {y}=(y_1,y_2,y_3)\)、及び\(\v {i}=(i_1,i_2,i_3)\) に対して、\(i=1,2,3\)とすれば
と書けるので
となる。右辺第一項は\(D\)の表面積分となるが、電流が\(D\)内に限られているので\(0\)となる。 第二項を考えよう。電荷の保存則\(\pd _t*\rho +d*\v {i}=0\)より\(\pd _t\rho =0\)であればこの項も\(0\) となる。さてこれは何を意味するのだろうか。ある領域\(U\)で\(d*\v {i}>0\)であると仮定しよう。 すると\(\pd _t\int _U*\rho =\int _{\pd U}*\v {i}>0\)となり、これは領域\(U\)内の荷電粒子が増えていること を意味する。負の場合には逆に減ることを意味する。今の場合には定常的な磁気現象を考えている ので、\(\pd _t\int _U*\rho =0\)でないといけない。即ち\(d*\v {i}=0\)である。従って
以上より、(173)の右辺第一項は\(0\)となる。第二項はというと、まず次の計算 をしてみよう。
上記と同様の理由により左辺と右辺第三項は\(0\)である。従って
となる。従って(173)の右辺第二項に現れる積分は
となる。ここで\(\v {a}\times (\v {b}\times \v {c})=\v {b}\cdot (\v {a}\cdot \v {c})-\v {c}\cdot (\v {a}\cdot \v {b})\)を用いた1515
。 さてここでを磁気モーメント(磁気双極子モーメント)という。 以上により電磁ポテンシャルは磁気モーメントを用いて
と書ける。
ここで磁気モーメント\(\v {m}\)を表す式(180)を見てみよう。 積分変数を\(\v {y}\)から\(\v {y}+\v {s}\)に平行移動した場合、
となるが、第二項は上述のことから\(0\)となる。即ち磁気モーメントの定義には積分変数の取り方 に依存しないことに注意されたい。
次に微視的に見た場合を考える。微視的に見れば、電流\(\v {i}\)とは荷電粒子の電荷\(e\)と 速度ベクトル\(\v {v}\)を用いて\(\v {i}=e\v {v}\)と書ける。 そうすると磁気モーメントは
一方荷電粒子の角運動量\(\v {L}\)は
従って角運動量と磁気モーメントとの関係式
が得られる。しかし実際には最後のこの等式は必ずしも正しいとは限らない。 電子のようにスピンを持つ粒子の場合にはこれを 考慮する必要がある。スピンとは古典的には電子の自転と思ってもよいかもしれない。 しかしこれも実際には正しくないということを断っておく。 正確にはスピンとはローレンツ変換(もしくは空間回転の\(SO(3)\)) のユニタリー表現を考える際に現れてくるものであり、量子論的な概念である 1616
。 電子の場合、正しい磁気モーメントと角運動量との関係式は、スピンを\(\v {S}\)と書くとで与えられる。ここでスピンの前のfactor \(2\)は相対論的量子論により説明される。 また実際にはこのfactorは正確に\(2\)ではない。このずれは異常磁気モーメント 1717
とよばれ 電磁量子力学(QED)により非常に精度よく説明されている (物理学史上、実験値と最もよく一致している!)。 このfactorは\(g\)と表され、g因子と呼ばれる。 電磁量子力学による計算によると、およそ\(g=2.0023193\)である 1818 。
一様な磁場の場合
簡単に磁場\(\v {B}\)が近似的に一様であると仮定してみる。するとベクトル・ポテンシャルはであることは容易に分かる。実際
となるからである。 ここで再び微視的に見てみる。電子ひとつに対して、ラグランジアン(45)式にベクトル・ポテンシャル(188)を適用すると
ここで、最後の等式の第二項目は電子と磁場との相互作用を表すポテンシャルエネルギーと解釈出来る。 このポテンシャル項をさらに書き換えよう。ポテンシャルを\(\mathcal {U}\)と置くと、
従って物質全体の領域\(D\)全体で積分すれば、物質全体のポテンシャル\(U\)は(180)より 磁気モーメントを用いて、
と書ける。最後の積分は磁気モーメント\(\v {m}\)を表す式(173)が積分変数の取り方に依存しなかったことに注意されたい。
ここで磁場\(\v {B}\)が近似的に一様であるとしたが、ゆるやかに変化している場合を考える。 近似的に上述のことは成り立つから、物質が受ける力はポテンシャル\(U\)の勾配で与えられる。即ち
となる。
磁気モーメントが分布している場合
古典的な見方を取ると、分子中の電子の運動により分子は磁気モーメントを持つ。 従って物質中に分布した分子の磁気モーメントにより磁場が生じる。 双極子モーメントの場合の考察と同様に格子状に分布していると考えるとイメージしやすいかも しれない。物質全体の領域\(D\)を細分し、 領域\(V_i\ (i=1,2,3,\cdots )\)に分ける。各領域\(V_i\)には分子が1つだけ含まれるように取る。 この時ベクトル・ポテンシャルはとなる。ここで\(V_i\)内の積分に関して、積分変数を\(\v {y}=\v {z}_i+\v {y}_i\)と取ろう。 ここで\(\v {y}_i\)は\(V_i\)内の固定点であり、例えば分子の中心に取ればよい。すると
ここで
である。ここで分子内には1つの電子のみが存在していると仮定した。 \(\v {i}_i\)は\(V_i\)内の電子の速度\(\v {v}_i\)を用いて\(\v {i}_i=e\v {v}_i\)と書ける。 さて、ここで巨視的なスケールへ移るには、いくつかの\(V_i\)を含むような、 巨視的には1点として見なせる程度の領域\(D_j\)内での平均を取ればよい。 \(D_j\)内に含まれる領域\(V_i\)内の点\(\v {a}_i\)は全て同一の点として見なすことが出来る。 従って平均は磁気モーメントに対してだけ取ればよい。 \(D_j\)の体積を\(\Delta v=\varepsilon \alpha \)、格子点の個数密度を\(n\)とする。 ここで\(V_i\)の磁気モーメント は、\(\v {z}_i=\varepsilon \v {a}_i\)とすれば
と書ける。従って磁気モーメントの平均\(\braket {\v {m}}\)は
と書ける。巨視的な意味での磁気モーメントは\(\v {M}=n\braket {\v {m}}\)で与えられる。 従って(195)の連続近似は
となる。ここでさらにこれを変形すれば
ここで\(\pd D\)上で\(\v {M}=0\)であるとすると、
を得る。これとカレントにより生成される電磁ポテンシャルの表式(66) と見比べると磁気モーメントが分布している場合には電流ベクトル
が存在すると見なして計算すればよいことが分かる。
磁場の強さ
さて前節で磁気モーメントが分布している場合には、電流\(\v {i}_m\)が存在していると考えなければ いけないことを見た。言い換えれば微視的に見れば原子核の周りを回っている電子により生成される 磁場からの寄与が生じる。従って微視的には、自由荷電粒子による電流\(\v {i}\)と分子内の 電子による電流\(\v {i}_m\)により生成される磁場が全磁場\(\v {B}\)である。 即ち定常状態においてはと書ける。さてここで巨視的には電流ベクトルは\(\v {i}\)で与えられる。従って巨視的には 「アンペールの法則」の節で説明したように、磁場の強さ\(\v {H}\)をアンペールの法則 \(d\v {H}=*\v {i}\)を満たすように定義する。 従って
さて統計力学的な観点からいうと、平衡状態においては系のエネルギーが最も低い準位 が最も安定である。従って(192)を見ると磁気モーメントと磁場の向きがそろった時に最もエネルギーが低くなるため、 平衡状態に達すると磁気モーメントは磁場と向きをそろえると考えられる。 従って(204)より磁場の強さ\(\v {H}\)も磁場と平行になるのが分かる。 通常は磁場を磁場の強さを用いて表すので、磁気モーメント\(\v {M}\)と磁場の強さ\(\v {H}\)との 関係を
と表す。比例定数\(\chi ^*\)を磁化率という。また\(\mu =1+\chi ^*\)を透磁率という 2020
誘電率と同様に、真空中の透磁率\(\mu _0\)を\(1\)に取らなかった場合には、透磁率は \(\mu =\mu _0(1+\chi ^*)\)となる。この場合には\(1+\chi ^*\)を比透磁率と呼ぶ。 やはり今は\(\mu _0=1\)なのでその区別は必要ない。
が得られる。
物質中のMaxwell方程式
前節までのことを踏まえて、巨視的に見たときの物質中のMaxwell方程式をもう一度考えてみよう。 一般的に、「アンペールの法則」の節で説明した 電束密度と磁場の強さを用いたアンペール-マクスウェルの法則(26) が成り立つ。そこでの議論を繰り返すと、 電荷の保存則\(d_4\dagger J=0\)が成り立つので、ポアンカレの補題により \(d_4\dagger F_2=\dagger J\)なる2-form \(F_2\)が存在する。 \(F_2=*\v {H}+\v {D}\w dt\)と置くと、物質中でのMaxwell方程式の内の2式が導かれる。Maxwell方程式の残りの2式は、2-form \(F_1=*\v {B}+\v {E}\w dt\)を定義すると \(d_4F_1=0\)により与えられる。即ち
である。この2式から再びポアンカレの補題より、 \(d_4A=F_1\)なる電磁ポテンシャル\(A=\v {A}-\phi dt\)が定義できて、これより
が得られる。さてここで物質中のMaxwell方程式の最初の2式 (207)、(208)に \(\v {D}=\varepsilon \v {E}\)、及び\(\v {H}=\frac {1}{\mu }\v {B}\)を代入しよう。 (207)は\(v^2=\frac {1}{\mu \varepsilon }\)と置けば
これに両辺にホッジ作用素\(*\)をかけたものの左辺は
となる。 (208)は
となる。これの両辺にホッジ作用素をかけたものに(212)を代入すると左辺は
以上によりゲージ固定条件を
と取れば(これもローレンツゲージと呼ばれる)、波動方程式
が得られる。ここで上で定義した\(v=\sqrt {\frac {1}{\mu \varepsilon }}\)は物質中での電磁波 の位相速度であることが分かる。 また電場と磁場の満たす波動方程式は(211)、(212)を用いれば
であることが分かる。以上が巨視的に見た物質中での電磁場の満たす波動方程式である。
一般的な場合における誘電体中の電束密度と電場、磁場の強さと磁場との関係はもっと複雑な 形を取ることもある。 例えば誘電率と透磁率がそれぞれ電場と磁場の振動数ごとに異なる場合である。 そのような場合には
のようになる。この時には、電束密度と磁場の強さはそれぞれ
で与えられる。このような場合に上記のようなことをやろうと思えば、\(\v {D}\)と\(\v {H}\)に \(\v {E}\)と\(\v {B}\)を代入する際に時間成分に関してフーリエ変換しておく必要がある。 従って最終的に得られる電場と磁場の波動方程式には時間微分の項が現れない。 その場合には一般的にいって波動方程式の時間微分を振動数\(w\)に置き換えたものとなる。 即ち
となる(もう一度注意しておくが、これらの物理量は全て巨視的に見た時のものである)。 これから誘電率や透磁率を求めることが出来る。 このような場合、系にカレントが存在しなければ、 容易に分かるように波数ベクトルの大きさ\(k\)と振動数\(w\)との間には
なる関係がある。
電磁場中の荷電粒子の運動
この節では微視的に見た場合の、電磁場中を光速より十分遅い速度で運動する荷電粒子の 運動を考えよう。 この場合には十分よい近似でニュートンの運動方程式が成立すると仮定できる。
水素原子による電磁波の散乱
水素原始中の電子による電場の散乱を考える。 ここでは水素原子中の電子の運動を古典的な円運動と見なす。系に存在する 電場を簡単のため\(\v {E}=\v {E}_0e^{-iwt}\)とする(この実部といってもいいがここの計算では 本質的ではない)。ここで\(\v {E}_0\)は 時間に依存しないベクトルである。 電場\(\v {E}\)中の、水素原子核の周りを円運動する電子の運動方程式はで与えられる(磁場によるアンペール力は無視できる。なぜなら真空中の電磁場(138) より、光速\(c\)をあらわに書けば\(k=\frac {w}{c}\)より\(|\v {B}|\sim \frac {1}{c}|\v {E}|\) だからである。)。 ここで\(w_0\)は電子の角振動数 (原子核の周りを回る電子の角振動数を固有振動数と呼ぶ)である。 右辺の\(-mw_0^2\v {x}\)の項は 水素原子核のクーロン力を表している。今は円運動をしていると仮定しているのでこのような 形となる。 また電子自身の作る電磁場による自己力(自己相互作用) は無視している(自己相互作用は場の量子論において有効に取り入れられる)。 この方程式の特解と斉次解との和が一般解であるが、斉次解は電子の固有振動を表しており、 電場による強制振動を表しているのは 前者のほうである。\(\v {x}\)を
とおくと
よって
この電子の運動から放射される電磁波が電子によって散乱された電磁波になる。 従って散乱される電磁波は
となる。この結果を見れば、 入射電磁波の角振動数が電子の固有振動数と等しいところで最も散乱されるのが分かる (この結果を見れば\(w=w_0\)で発散しているが、実際には発散しない)。 このように、散乱波のエネルギーが散乱体の固有振動数でピークを作る現象を共鳴という。
また、入射電場の角振動数\(w\)が\(w_0\)より十分小さい時(\(w_0\gg w\))には
を得る。このような散乱をレイリー散乱という。 例えば空気分子による可視光の散乱を考えると、空気分子の大きさ (\(0.1\mathrm {nm}=10^{-10}\mathrm {m}\)のオーダー)に対して、可視光の波長 (\(400\mathrm {nm}\sim 800\mathrm {nm}\)のオーダー)であるのでここでの仮定が成り立つ と考えてよい 2121
電磁波の波長\(\lambda \)と角振動数\(w\)の関係は\(w=\frac {c}{\lambda }\sim 10^{15} [1/\mathrm {s}]\)のorder。一方水素原子中の電子の角振動数は、角運動量と角振動数との関係から 概算できる。角運動量と角振動数の関係は\(L=mr^2w\)。 量子論によれば水素原子中の軌道角運動量のorder がプランク定数\(\hbar \)程度なので\(10^{-34}[\mathrm {kg}\cdot \mathrm {m}^2/\mathrm {s}^2]\) のorder。 電子の質量が\(10^{-30}[\mathrm {kg}]\)のorder。従って角振動数は\(10^{17}[1/\mathrm {s}]\)の orderとなる。
プラズマ振動
空気中に電荷\(e\)の荷電粒子が電離して自由に運動している場合、 あるいは金属中の自由電子の運動は 、荷電粒子の速度ベクトル\(\dot {\v {x}}\)に対して抵抗\(-k\dot {\v {x}}\)を受けて運動する。 前者は荷電粒子が空気分子との衝突による抵抗、後者は自由電子が金属イオンとの衝突による 抵抗である。前者のような状態をプラズマという。 さて、ここで電場\(\v {E}\)がある場合には電荷\(e\)の粒子の運動方程式はで与えられる。ここでも簡単のため電場を\(\v {E}=\v {E}_0e^{-iwt}\)の形であるとする。 今度は斉次解は指数関数的に減衰していく。従って定常状態ではその項は無視することが出来る。 特解は\(\dot {\v {x}}=\v {a}e^{-iwt}\)の形で求めることが出来る。 運動方程式に代入し\(\v {a}\)を求めると
となる。さて電流ベクトル\(\v {i}\)は、荷電粒子の個数密度を\(n\)とすれば
で与えられる。これに上で求めた\(\dot {\v {x}}\)を代入すれば
を得る。\(\sigma \)は電気伝導率といい、(239)はオームの法則 として知られている。 これから非斉次波動方程式は
これを時間微分すれば\(\v {E}=-\pd _t\v {A}\)より
となる。必然的に系に存在する電場はこの方程式も満たさなければならない。 これをさらにまとめると
となる。ここで\(\varepsilon =1+\frac {i\sigma }{w}\)と置く。ここで\(mw\gg k\)とすると \(\sigma =\frac {ine^2}{mw}\)と近似出来て、
となる。ここで\(w_p\)はプラズマ振動数と呼ばれる。 また電場の満たす方程式は
と書ける。即ち\(\varepsilon \)は誘電率と解釈できる 2222
実際には誘電率\(\varepsilon \)と透磁率\(\mu \)との積\(\varepsilon \mu \)であるが、 ここでは簡単のため、自由電子により作られる磁気モーメントはバラバラなため 平均して\(0\)であると考え、 透磁率を\(1\)であるとした。
と書ける。これは場の量子論では質量が\(w_p\)の粒子の場を表す方程式である。 言い換えれば電場が荷電粒子との相互作用により質量\(w_p\)を獲得していると解釈出来る。 このような現象は場の量子論でのHiggs機構と似ている点がある。 電磁場のゲージ対称性は電磁場に質量項があるとなくなる。 即ち電磁場と荷電粒子との相互作用により電磁場はゲージ対称性を失っている。 このように力学的に対称性が破れてしまうことを自発的対称性の破れという。 方程式(245)を満たす粒子の運動量\(\v {p}\)とエネルギー\(E\)の関係は、 プランク定数\(\hbar \)を用いて
で与えられる。 ここで\(\v {p}=\hbar \v {k}\)である。 以下では記号を簡単にするために\(\hbar =c=1\)と置く。 \(w_p<w\)の場合には\(E=w\)ともなりうる。 \(w_p>w\)の場合にはそうならない。 一般に電磁場は\(\v {E}_0e^{-iwt}\)の形のモードの重ね合わせである。 それらのモードの内、\(w^2=\v {p}^2+w_p^2\)を満たすモードがエネルギー\(E\)のモードとなる。 従って\(E<w_p\)のモードは存在しない。 言い換えれば、そのエネルギーの電磁波はこの電離層もしくは金属中に入り込めないのである。 電磁波は中に入ろうとした瞬間に質量\(w_p\ (\frac {\hbar w_p}{c^2})\)を持ち重くなる。 電磁波の持っているエネルギー\(E\)の一部が質量エネルギー\(w_p\ (\hbar w_p)\)に変換されるのである。 従って\(E<w_p\)の電磁波はエネルギーが足りないので中に透過できずに反射されるであろう と考えられる。 結果、そのような場は中では指数関数的に減衰する。
次に振動数が十分に小さく(即ち\(k\gg mw\))、 電場\(\v {E}\)が近似的に定ベクトルである場合を考えておこう。 この場合には運動方程式の解は近似的に\(\dot {\v {x}}=a\exp (-\frac {k}{m}t)+\frac {e}{k}\v {E}\) となる。 従って定常状態では指数部分は完全に減衰するため、\(\v {i}=\frac {ne^2}{k}\v {E}\)となる。 このような場合には電気伝導率は\(\sigma =\frac {ne^2}{k}\)で与えられ、 これは電気抵抗率\(\frac {k}{ne^2}\)を与える。 ここで仮定した条件は\(\frac {k}{ne^2}\gg \frac {w}{w_p^2}\)と表すことが出来る。 この場合にも誘電率は虚数部を含み、従って金属中の電場は減衰する。
一般的に言って物質中に(巨視的な意味で)荷電粒子が存在しなければ、 誘電率が負の場合、もしくは虚数部がある場合には波数ベクトルが虚数となり、 電場は指数関数的に減衰する。従ってその場合には、物質の表面付近にだけ電場が存在する ことになる。
物質中の電磁波
光の分散
物質中での電磁波について考察しよう。物質を形成する原子中の電子の運動を古典的な 円運動と考える。従ってそこに電磁波が照射された時の、電子の運動方程式は (230)と同じである。 従って電流ベクトル\(\v {i}\)は、電子の個数密度を\(n\)とするととなる。電気伝導率は
である。今度は系に存在する電場の満たすべき方程式は
である。従って誘電率は
ここでは各原子は磁気モーメントを持つが、物質全体としては磁気モーメントの向きが バラバラになって揃ってないと考え、やはり磁気モーメントは打ち消しあい\(0\)であると考える。 従って透磁率は\(1\)であると仮定している。
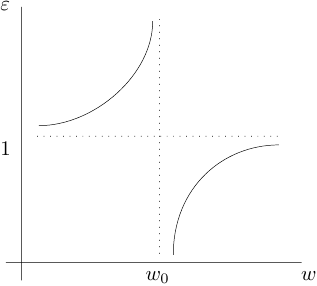
後に説明するが、\(n=\sqrt {\varepsilon }\)は屈折率と解釈出来る。 従って可視光域が\(w_0\)より高いところにあるか、低いところにあれば光の分散は 波長の順に並ぶことになる。可視光域に\(w_0\)が入っていれば光の分散は波長の順に並ばないことに なる。これは異常分散と呼ばれる。 このように屈折率を角振動数の関数として表したものは分散公式と呼ばれる。
波束
前節で物質中などの、電磁波と相互作用する荷電粒子が存在する場合の電磁場を考えた。 そのような場合には電磁波の各モードの角振動数\(w\)は波数ベクトル\(\v {k}\)の関数\(w(\v {k})\)として 表される。 この関係式はこれまでの例の場合には(242)より、誘電率を\(\varepsilon (w)\)とし、から求めることが出来る。
さて、ここで\(\varepsilon <1\)の時には 位相速度\(v=\sqrt {\frac {1}{\varepsilon }}\)が光速\(c\ (=1)\)よりも大きくなる。 実際(246)の関係式によれば、位相速度は\(v=\frac {E}{|\v {k}|} =\frac {\sqrt {\v {k}^2+w_p^2}}{|\v {k}|}>1\ (=c)\)で与えられる。 これは必ずしも信号が光速より早く伝達することを意味しない。 例えば電気信号は電磁波のかたまり(これを波束という)によりなる。 即ちある瞬間を取れば、電磁波がある領域の中にだけにかたまって存在している(下図)。
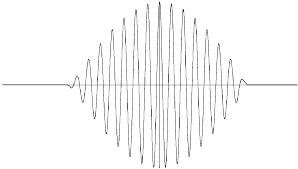
そのような波は様々な波長、従って様々な波数ベクトルのモードの重ね合わせにより形成される。 従って波束は
の形を取る。この時波数ベクトル\(\v {k}_0\)で\(\v {a}(\v {k})\)がピークを作り、 \(\v {k}_0\)を中心としたある範囲\(D_{k_0}\)の外では\(\v {a}(\v {k})=0\)となる場合には、
となる。ここで\(h.c\)はエルミート共役の意味である。積分は全体として \(\v {x}-\frac {\pd w}{\pd \v {k}}(\v {k}_0)t\)の関数である。言い換えれば 速度\(\frac {\pd w}{\pd \v {k}}(\v {k}_0)\)で進む波を表している。波束は平均してこの速度で 進行する。この速度を群速度という。波のかたまり自体は上式の頭についた指数 の位相に従って振動している。 例えば\(w^2=\v {k}^2+w_p^2\)の場合には(\(E=w\)、\(\v {p}=\v {k}\))
となる。
では極端な場合として\(\v {k}=\v {k}_0\)に極端なピークを持ち、それ以外の波数ベクトルで \(\v {a}(\v {k})=0\)となるような場合はどうなるでろうか。 式で表すならば\(\v {a}(\v {k})\sim \delta (\v {k}-\v {k}_0)\)の場合である。 この場合には\(\v {A}\)は上式の頭についた指数に比例した形となる。 これは電磁波が速度\(v=\frac {w(\v {k}_0)}{|\v {k}_0|}\)で進行しているということであろうか。 量子論的な解釈をするならば、電磁場は量子化されることにより、粒子としての性質を持つ。 これを光子という。 運動量\(\v {p}=\hbar \v {k}\)が特定の値を取るために、不確定性関係により光子の位置が 完全に不定となる。従って量子論的な観点からいうと、 光子があらゆる場所に(等確率で)存在することになる。 従って位相速度が光速より早いことによる物理的な問題はなんら生じない。
光の屈折と反射
2つの異なる(正の)誘電率\(\varepsilon _1\)及び\(\varepsilon _2\)の誘電体が接している場合、 それらの間の巨視的な電磁場の境界条件を考えてみよう。 ここでは誘電体中に自由荷電粒子が存在しないとする。 従って巨視的なMaxwell方程式はとなる。実際にはここではこれら全ての式を使うわけではないが一応書き下しておいた。 さて2つの誘電体が接している面の一部に着目しよう。
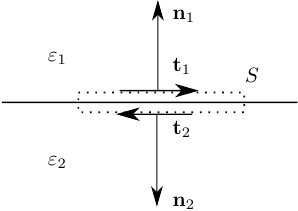
上図の上面が誘電率\(\varepsilon _1\)の誘電体、下面が誘電率\(\varepsilon _2\)の誘電体である。 図の点線で囲まれた(面の)領域を\(S\)とする。\(S\)の上面から出る法線ベクトルを\(\v {n}_1\)、 下面から出る法線ベクトルを\(\v {n}_2\)とする。また上面の接線ベクトルを\(\v {t}_1\)、 下面の接線ベクトルを\(\v {t}_2\)とする。ベクトルの方向は図の通りである。 (256)式を\(S\)で積分すると
ここで\(S\)を法線方向の間隔を\(\rightarrow 0\)に近づければ\(S\)の面積が\(\rightarrow 0\)となり、 第二項は無視出来る。第一項はストークスの定理より\(S\)の周回積分となるが、そのような極限 のもと\(\v {E}\)の接線成分のみが寄与する。従って上面の電場を\(\v {E}_1\)、下面での 電場を\(\v {E}_2\)と置けば
ここでこの極限のもと\(\v {t}_1=-\v {t}_2\)となるので、結局
を得る。 さてここで電磁場の屈折と反射を考えよう。 電場が上方から誘電体の境界面に入射し、一部は透過して残りは反射する。 入射電場を\(\v {E}_{in}\)とし、、反射した電場を\(\v {E}_{ref}\)、透過した電場を\(\v {E}_{pen}\)と 置こう。上の電場の境界条件に当てはめると\(\v {E}_1=\v {E}_{in}+\v {E}_{ref}\)及び \(\v {E}_2=\v {E}_{pen}\)である。 磁場に関しても同様に条件が得られる。上面での磁場を\(\v {B}_1\)、下面での磁場を\(\v {B}_2\) と置く。 ここでは\(2\)つの誘電体の透磁率は共に\(1\)であるとしよう。 すると(255)より電場と同様の条件
が得られる。入射磁場を\(\v {B}_{in}\)、反射磁場を\(\v {B}_{ref}\)、透過磁場を\(\v {B}_{pen}\) とすれば\(\v {B}_1=\v {B}_{in}+\v {B}_{ref}\)及び\(\v {B}_2=\v {B}_{pen}\)である。 次に条件(257)を、上記の\(S\)を断面として持つような領域 で積分することにより、\(\v {D}\)の法線成分のみの寄与が残る。 従って\(\v {D}=\varepsilon \v {E}\)及び\(\v {n}_1=-\v {n}_2\)より
が得られる。磁場に関しても法線成分に関して同様の条件が得られる。 これらの条件は後で用いることになる。
さて、さて簡単のためこれらの電磁波が平面波であると仮定する。 それらの波数ベクトルをそれぞれ\(\v {k}_1\)、\(\v {k}_2\)、 \(\v {k}_3\)とし、それら波数ベクトルの法線軸との成す角をそれぞれ\(\theta _1\)、\(\theta _2\)、 \(\theta _3\)とする。また簡単のため座標軸を接線方向を\(x\)軸に、法線方向を\(y\)軸に、 それらに垂直な方向を右手系で\(z\)軸に取ろう(下図)。
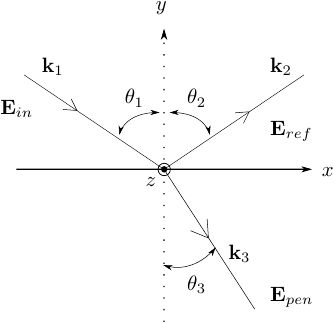
すると今は平面波なので(そうでなくても各モードに関しては)各電場が全て\(0\)でないならば 境界面上では位相が全て揃っている必要がある。従って境界面上で
及び振動数は全て\(w\)である。また境界面上では\(y=0\)である。境界面上で常にこの関係が成り立つ ためには各波数ベクトル\(\v {k}_i\)の\(x\)成分と\(z\)成分 がそれぞれ全て等しくないといけない。ここでは簡単のため\(z\)成分が\(0\)となるように 座標系を取り直そう。従って\(x\)成分に関して
が成り立つ。ここで波数ベクトルと振動数との関係は\(k_i^2=\frac {w^2}{v_i^2}\)(\(v_i\)は 波数ベクトルが\(\v {k}_i\)の電場の位相速度。従って\(v_1=v_2\)である)なので
が得られる。従って\(\sin \theta _1=\sin \theta _2\)、即ち入射角と反射角は等しい。 また入射波と透過波との関係は
で与えられる。これをスネルの法則という。 誘電率が異なれば当然位相速度も異なるので、一般的には\(n\neq 1\)である。 即ち電磁波は誘電率の異なる誘電体に透過した時、屈折する。 さて今電磁波が真空から誘電体中へ入射する場合を考えれば、誘電体中での位相速度を\(v\)と すると
なる関係が見出せる。\(n\)を屈折率という。
ここで(267)より、\(\sin \theta _3=\sqrt {\frac {\varepsilon _1}{\varepsilon _2}} \sin \theta _1\) と書けるが、これには条件\(0\leq \sin \theta _3\leq 1\)が課せられないといけない。 従って\(\theta _1\)が
の条件を満たす時には電磁波は透過しない。言い換えると入射電磁波は全反射する。 これは必然的に\(\varepsilon _2<\varepsilon _1\)でないと起こりえない。
ここでさらに計算を進めてみよう。 入射電場\(\v {E}_{in}\)はクーロンゲージの場合には\(\v {k}_1\cdot \v {E}_{in}=0\)なので、 \(\v {E}_{in}=(a_1,a_1\tan \theta _1,b_1)\)と書ける。同様にして\(\v {E}_{ref}\)、\(\v {E}_{pen}\)も 表すことが出来て、まとめると
の形で書ける。さて条件(261)より\(\v {t}_1\)を\(x\)方向の単位 ベクトルに取れば、\(a_3=a_1+a_2\)が得られる。同様に\(\v {t}_1\)を\(z\)方向の単位ベクトルに 取れば\(b_3=b_1+b_2\)が得られる。 これらの\(y\)成分に関して(263)より、
まとめれば
と書ける。 次に磁場に関する条件を考えよう。平面波の場合には磁場は電場を用いて
と書けたことに注意しよう。 従って磁場に対する条件(262)より\(\v {t}_1\)を\(x\)方向の 単位ベクトルに取れば
が得られる。まとめると
となる。ただし\(k_1=k_2=\sqrt {\varepsilon _1} w\)、\(k_3=\sqrt {\varepsilon _2} w\)を用いた。 これらの条件式をフレネルの公式という。 ここで\(\theta _1+\theta _3=\frac {\pi }{2}\)の場合には\(\tan (\theta _3+\theta _1)=\infty \)となるので \(a_2=0\)となる。この時\(\tan \theta _1=n\)となる。この条件を満たす入射角を ブリュースターの偏光角という。
最後に誘電率が振動数に依存する場合について簡単に触れておこう。 例として「プラズマ振動」の節の結果を用いてみよう。誘電率を\(\varepsilon _1=1\)、 \(\varepsilon _2=1-\frac {w_p^2}{w^2}\)と置こう。 このような場合には電磁場の各振動数のモード毎にこれまでの議論を当てはめればよい。 条件(267)より
でないといけない。従って\(w<w_p\)の場合には透過電磁波は存在しえない。 これは「プラズマ振動」の節の結果と一致する。
回路中の定常電流
金属導線の中を定常電流が流れている場合を考える。この場合、定常電流なので、巨視的なMaxwell方程式の時間微分に関する項は\(0\)となる。より、スカラー・ポテンシャル\(\phi \)を用いて、
と書ける。オームの法則より\(\v {i}=\sigma \v {E}\)である。従って回路の導線に沿った曲線を\(C\)とすると
となる。回路は閉じているが、実際には回路の一方は電極のプラス極に接続されており、もう一方はマイナス極に接続されているため、導線のそれぞれの端点どおしは繋がっておらず、従って導線に沿った曲線\(C\)に沿った積分は、曲線\(C\)のプラス極側の端点を\(p_1\)、マイナス極側の端点を\(p_0\)として、それらの点でのスカラー・ポテンシャルをそれぞれ\(\phi _1\)、\(\phi _0\)と置けば、
となり、\(\phi _1\)と\(\phi _0\)との電位差となる。 回路中の電気伝導率\(\sigma \)が一定であるならば、回路中のスカラー・ポテンシャルは端点\(p_0\)からの、曲線\(C\)に沿った位置\(r\)でのスカラー・ポテンシャルは\(\phi =(\phi _1-\phi _0)r/L+\phi _0\)で与えられる。ただし\(L\)は曲線\(C\)の長さである。電気伝導率\(\sigma \)が回路中一定ではなく、ある区間\(I\)でのみ\(\sigma \sim 1\)の値をとり、それ以外の区間\(L_1\)(マイナス極側)と\(L_2\)(プラス極側)では\(\sigma \gg 1\)の場合には、区間\(I\)においてスカラー・ポテンシャルは\(\phi =(\phi _1-\phi _0)r/L+\phi _0\)の関係となる。ただし、この場合には\(L\)は区間\(I\)の長さであり、\(r\)は区間\(I\)の始点からの距離である。\(L_1\)および\(L_2\)それぞれの区間の中ではスカラー・ポテンシャルは一定である。 この時には区間\(I\)と区間\(L_1\)との接合部と\(I\)と\(L_2\)の接合部それぞれにおいてスカラー・ポテンシャルの微分\(d\phi \)が連続はなくなってしまう。 従って、例えば\(L_1\)と\(I\)との接合部を囲むように導線を切り取ったような領域を\(D\)とすれば、ポアソン方程式より接合部においては区間\(L_1\)側での\(d\phi \)の値\((=0)\)と区間\(I\)側での\(d\phi \)の値との差に導線の断面積\(A\)をかけた値
だけの電荷が存在することになる。もう一方ではこの逆符号の電荷が存在する。 これは区間\(L_1\)から流れ込んでくる電子が、電気伝導率が低い区間\(I\)へ流れ込む時に、急に電子が流れにくくなるために、接合部での電子の密度が周囲より高くなっていると解釈することができる。一方、区間\(I\)からまた区間\(L_2\)ヘ流れ出ていく時には電気伝導率が高くなり、一気に流れやすくなるために電子の密度が周囲より低くなっているという風に解釈することができる。
ここで定常電流でのオームの法則は電場中の電子の運動方程式
を考えればよい。ここで\(\tau \)は緩和時間と呼ばれる。定常状態では\(\diffn {2}{x}{t}=0\)であるため
が得られ、これに電子の個数密度\(n\)を書ければ
が得られる。定常電流の電気伝導率は\(\sigma =\frac {ne^2\tau }{m}\)と得られる。
特殊相対性理論
「ローレンツ対称性」の節で説明したように、Maxwell理論はニュートン力学の持つガリレイ変換 による共変性、即ちガリレイ対称性を持たない。 代わりにローレンツ対称性を持っていることが分かった。この節では アインシュタインによるローレンツ対称性を持った力学、 即ち特殊相対性理論を説明しよう。 これは重力現象を除いた巨視的な意味での力学を説明する。また、 光速\(c\)が十分に大きいと見なせる程度の速度においては、近似的にニュートン力学を再現する。 この章では光速\(c\)を\(1\)に取らないようにしておく。 従ってミンコフスキー時空の座標系は\(x^\mu =(ct,\v {x})\)である。
ローレンツ変換
この節では簡単に固有順時ローレンツ群(以下簡単にローレンツ群と呼ぶ)\(SO(1,3)\) による変換のもと、慣性系における時空の座標系がどのように変換しうるかを考察しよう。 ローレンツ群を調べる最も簡単な方法は基準となる時空内の点をひとつ選び、それがローレンツ変換の もとどのように変換するかを調べることである。 簡単のためにまずは2次元の時空\(x^\mu =(ct,x)\)で考えてみる。 基準となる点を\((ct_0,0)\)とする。 さてローレンツ変換のもと\(\beta =\frac {v}{c}\)と置くととなる。\(ct\)と\(x\)との関係は、\(\beta \)を消去すれば
で与えられる。逆にある点\((ct,x)\)がこの関係(290)を満たすならば\(\beta <1\)なる \(\beta \)を用いて上の関係式(288)、(289)が得られる。 即ちそれらの点はローレンツ変換で移り変わることが出来る。 \(v=c\beta \)と置けば、これはもとの慣性系とこのローレンツ変換により移った慣性系との間の 相対速度と見なせる。 従って、点\((ct_0,0)\)からローレンツ変換により移ることの出来る点全体は (290)により特徴付けられる。下図 fig.1 の双曲線がそれらの点を表している。 上側が\(t_0>0\)の時に\((ct_0,0)\)から移ることの出来る点全体からなる曲線であり、 下側が\(t_0<0\)の場合である。
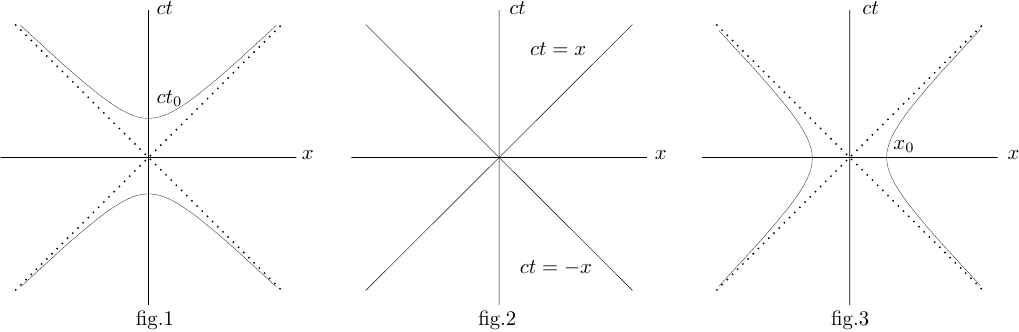
次に基準となる点を時間成分空間成分が等しい\((ct,x)=(k,k)\)に取ろう。 この場合には時間と空間座標との関係は
で特徴付けられる。 点\((k,\pm k)\)はローレンツ変換のもと
と変換する。 ここで\(\alpha \)は\((k,k)\)の場合には\(\alpha =\sqrt {\frac {1-\beta }{1+\beta }}\)であり、 \((k,-k)\)の場合には\(\alpha =\sqrt {\frac {1+\beta }{1-\beta }}\)である。従っていずれの場合にも \(\beta \)が\(-1<\beta <1\)の範囲を動く時、\(\alpha \)は任意の正の値に取ることが出来る。 従って(291)で表される直線の \((k,k)\)もしくは\((k,-k)\)と同じ象限にある任意の点に移ることが出来る(上図 fig.2)。
残りは基準となる点を\((0,x_0)\)に取った場合がある。 ローレンツ変換のもと
へと移る。 この場合には実質的に最初の場合で \(ct\)と\(x\)とを入れ替えたものに等しい。従って\((0,x_0)\)からローレンツ変換によって移ることの 出来る点全体からなる曲線は上図 fig.3 のようになる。 特徴づける関係式は
で与えられる。
最初の場合において\(ct_0\)を全ての正と負の実数に渡って変動させれば、fig.2 で表される 直線の上側と下側の領域は\((ct,0)\)から全てローレンツ変換によって移ることが出来る。 最後の場合では\(x_0\)を全ての正と負の実数に渡って変動させれば、\((0,x_0)\)から 直線の両側全てに移ることが出来る。従って以上でローレンツ変換によって移ることの出来る 時空点について全ての可能性が分かった。
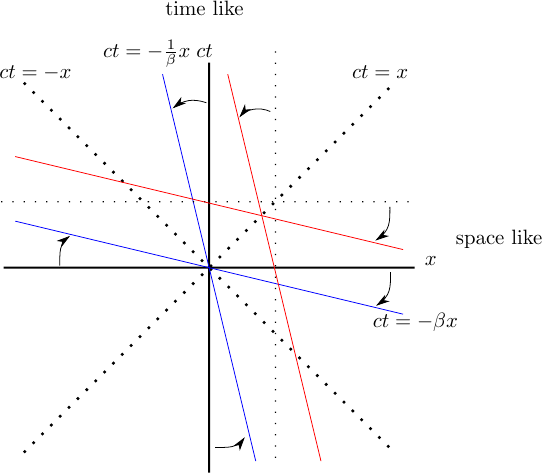
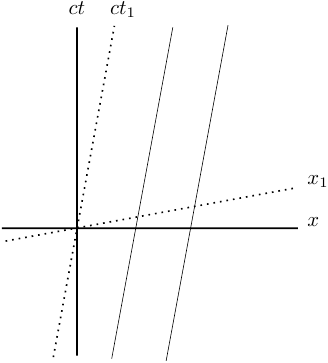
次にローレンツ変換を恒等変換\(1\)から連続的に変化させていった場合にそれぞれの基準点がどう 動いていくかを見てみよう。\(\beta =0\)の時、恒等変換である。\(\beta \)を\(0\)から正の方へ 増やしていった時、基準点\((ct_0,0)\ (t_0>0)\)は (289)より\(x<0\)の方向へ双曲線に沿って動いていく。逆に\(t_0<0\)の場合には \(x>0\)の方向へ動いていく。従って\(ct\)軸は直線\(ct=-\frac {1}{\beta }x\)へと移る。 今度は基準点\((0,x_0)\)の動きを見てみよう。同様に基準点は\(x_0>0\)の場合には\(ct<0\)の 方向へと動いていく。\(x_0<0\)の場合には\(ct>0\)の方向である。従って\(x\)軸は 直線\(ct=-\beta x\)へと移る。まとめてグラフに描いたものが下図である。 また直線\(ct_0=a\)(\(a\)は定数)は(105)及び(106)より \(ct+\beta x=\alpha a\ (\alpha =\sqrt {\frac {1-\beta }{1+\beta }})\)なる直線に、 \(x_0=b\) (\(b\)は定数)なる直線は\(\beta ct+x=\sqrt {1-\beta ^2}\cdot b\)なる直線に移る。
さて一般的な\(4\)次元ミンコフスキー時空の場合には、\(x\)を\(r=|\v {x}|\ (\ \v {x}=(x,y,z)\ )\) に置き換えただけである。 また\((ct)^2=\v {x}^2\)で表される4次元の超曲面は光円錐(light cone)と呼ばれる。 これは空間成分が\(2\)つの\(3\)次元時空を考えた時、この条件で与えられる領域が円錐を成す からである。\(4\)次元時空の場合には\(4\)次元の円錐を成す。 光円錐の中に相当する領域を時間的(time like)領域、外側に相当する 領域を空間的(space like)領域という。 また\(4\)次元ベクトル\(v\)がそれぞれの領域に属する場合には、ベクトル\(v\)は時間的、または 空間的などと呼ばれる。
以上の解析の意味するところをさらに理解するために、一定の速度で移動する質点の運動を考えよう。 再び\(2\)次元ミンコフスキー時空で考える。 今基準とする慣性系を任意にひとつ選び、それを\(K_0\)系(座標を\((ct_0,x_0)\)で表すことにする) と呼ぼう。質点が基準系\(K_0\)において一定速度\(v_0=c\beta _0\)で運動し、 時刻\(t_0=\tau _0\)に位置\(x_0=\lambda _0\)を通過していたとしよう。 基準系\(K_0\)での質点の軌道は
で与えられる。この直線がローレンツ変換のもとどう変わるか見てみよう。\(K_0\)系との 相対速度\(v_1=c\beta _1\)の慣性系\(K_1\)(座標を\((ct_1,x_1)\)で表すことにする) へのローレンツ変換は
で与えられた。 ここに(297)より与えられる条件\(cdt_0=\frac {1}{\beta _0}dx_0\)を用いて、 \(cdt_0\)と\(dx_0\)を消去してまとめると \(cdt_1\)と\(dx_1\)との関係式
が得られる。 これと(297)とを見比べると、
は慣性系\(K_1\)から見た、質点の速度であると解釈することが出来る。 これは特殊相対性理論における速度の合成則である。 特に\(v_0=c,v_1\neq c\)と置けば\(v=c\)となる。即ち光速はどの慣性系から見ても 一定である。 また基準系\(K_0\)の点\((c\tau _0,\lambda _0)\)に対応する慣性系\(K_1\)の点を \((c\tau _1,\lambda _1)\)とすれば
である。これらを用いて、質点の軌道は慣性系\(K_1\)では
で与えられる。ここで\(\beta \)は(300)で与えられる。
以上のようにローレンツ変換は異なる慣性系の間の座標変換を表している。「ローレンツ対称性」 の節で説明したように、\(\beta \ll 1\)の場合にはガリレイ変換を再現する。 基準系\(K_0\)における\(ct_0\)軸と\(x_0\)軸はローレンツ変換を行い\(K_1\)系に移ると、もはや 直交軸ではなくなる。特に\(x_0\)軸は水平ではなく、\(ct=-\beta x\)に移った。 これの意味するところは、\(K_0\)系で異なる位置で同時に(例えば時刻\(t_0=0\)に) 起こった事象は、\(K_1\)系においてはもはや同時刻に起こった事象ではなくなる ということである。言い換えると相対論では異なる慣性系間では同時性は成り立たない。
固有時間
さてMaxwell理論は計量行列を持つflatな多様体上の言葉で記述することが出来た。この計量行列により与えられる計量\(ds^2\)は
である。通常リーマン幾何では計量(線素)はそれを適当なベクトル場(によって生成される曲線) に沿って積分すれば、その曲線の長さ(距離)を定義する("幾何のお話"noteや "ゲージ理論"noteを参照)。ではミンコフスキー時空での線素は何を意味するのだろうか? 異なる慣性系の座標系間ではローレンツ変換で変換することが出来て、 この計量\(ds^2\)が定義より明らかにローレンツ変換のもと不変であるので、\(ds^2\)は 慣性系の取り方に依存しない幾何学的な量である。 慣性系\(K_0\)(座標系を\((ct_0,x_0)\)と置く) において第\(0\)成分のみが\(0\)でないベクトル場\(u=\pd _0\)を考えてみよう。 このベクトル場に対しては線素は\(ds^2=-c^2dt^2_0\)となる。 ここで新たに
なる量を定義しよう。すると
となる。即ちここで定義した\(d\tau \)はそのベクトル場が速度\(0\)となるような慣性系\(K_0\)に おける経過時間を表している。
一方、系\(K_0\)に対して相対速度\(v=c\beta \)の慣性系\(K_1\)(座標系を\((ct_1,x_1)\)とする)に対して はもはやベクトル場\(u\)はどの成分も一般には\(0\)とはいえないので \(ds^2=-ct_1^2+d\v {x}_1^2\)である。 従って
である。\(d\tau \)をこの系の座標系で表すと
となる。ここで\(v=|\v {v}|=|\frac {d\v {x}_1}{dt_1}|\)である。 これの意味するところを考えるため、次の思考実験を行う。 慣性系\(K\)に静止した状態で、系\(K\)で観測すると一定の時間間隔\(\Delta \tau \) で点滅する粒子を想定しよう。この時、慣性系の選び方には依存しない。 さて今慣性系\(K_0\)にこの粒子が静止しているとする。一方で\(K_0\)に対して一定な相対速度\(v\) で動いている慣性系\(K_1\)で、この点滅の時間間隔がどのようになるかを考えよう。 \(K_1\)から見るとこの粒子は一定速度\(v\)で運動している。\(K_1\)で観測される点滅の時間間隔 を\(\Delta t_1\)とすると、\(\Delta t_1\)の間に粒子の動く距離は\(\Delta x_1=v\Delta t_1\) である。
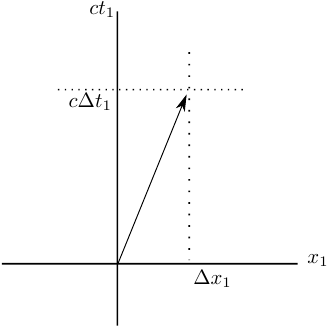
図で表すと、上図の原点で一度点滅し、次に\((c\Delta t_1,\Delta x_1)\)でもう一度点滅するのが 観測される。この間の時間間隔は系\(K_0\)においては\(\Delta \tau \)であるので
なる関係が得られる。即ち系\(K_1\)で観測する点滅の時間間隔\(\Delta t_1\)は 系\(K_0\)上で観測した時の時間間隔\(\Delta \tau \)よりも長い。 このことを指して運動している系の時間が遅れると表現される。 ここで注意しておくが、この場合には系\(K_0\)の立場と系\(K_1\)の立場とは全く違うということで ある。粒子は系\(K_0\)に対しては静止しており、系\(K_1\)に対しては動いている。 従って粒子が系\(K_1\)に静止しているならば、今度は逆のことが成り立つのである。
さて、以上により\(d\tau \)の意味が分かったと思う。 \(d\tau \)を粒子の運動する時空内の経路に沿って積分することにより 得られる値は、その粒子が静止していると見なせる慣性系における時計で測った時の時間を与える と考えられる。その意味において\(d\tau \)は固有時間と呼ばれる。 この概念は慣性系以外の系においても拡張して定義される。 粒子の任意の運動に対して、任意の時刻における粒子の速度と同じ速度で運動する 慣性系を想定すれば、速度が一致した瞬間には その慣性系における時間間隔が粒子の固有時間に等しくなるからである。 ここで注意しておかなければいけないことは、粒子が全ての時刻において 完全に静止していると見なせる系を選んで しまうと一般的にはもはやその系は慣性系ではないというということである。
一定の速度で運動する棒がどう見えるか
この節では、一本の棒が一定の速度で移動している場合に、それが相対論的には どのように観測されるかという問題を考えよう。ここで棒の長さは、その棒が静止している 慣性系\(K_1\)においては長さ\(L\)であるとしよう。もちろんこれは慣性系の選び方に依存しない。 また話を簡単にするために\(2\)次元の時空で考えよう。 任意の慣性系\(K\)に対して、系\(K_1\)が一定の相対速度\(v\ (\beta =\frac {v}{c})\) で移動しているとする。 系\(K\)の座標\((ct,x)\)と系\(K_1\)の座標\((ct_1,x_1)\)との間はローレンツ変換の関係がある。従って系\(K_1\)での棒の始点から終点までのベクトルは、系\(K\)においては \((\frac {vL/c}{\sqrt {1-\beta ^2}},\frac {L}{\sqrt {1-\beta ^2}})\)となる。 系\(K\)から見ると、始点も終点もそれぞれが一定の相対速度\(v\)で移動していることになる。 従って系\(K\)から見た、始点と終点の軌跡をグラフで描くと共に同じ傾きの\(2\)つの直線を 描くのが分かる(下図)。
それらの直線を求めるために、系\(K_1\)から見て棒の始点と終点の描く軌道をそれぞれ \(l_1:x_1=a\)及び\(l_2:x_1=a+L\)としよう。それぞれを系\(K\)にローレンツ変換すれば 直線\(l_1\)と\(l_2\)は簡単な計算により、それぞれ
となるのが分かる。系\(K\)から見た棒の長さ\(\acute {L}\)は系\(K\)における同じ時刻での 始点と終点の長さである。簡単な計算によりそれは
となるのが分かる。 従って系\(K\)から見ると棒の長さは\(\sqrt {1-\beta ^2}\)倍に縮んで見えることになる。
以上のことはもう少し少ない計算で辿り着くことが出来る。 系\(K\)において棒の長さを観測する時には、系\(K\)で同じ時刻での棒の始点と終点との長さを測る ことになる。従ってそのような方向ベクトルに対しては\(cdt=0\)なので線素は\(ds^2=dx^2\)となる。 一方、系\(K_1\)においてはローレンツ変換 (312)の関係を用いると、\(cdt=0\)の条件より\(cdt_1=-\beta dx_1\)が得られる ので
が得られる。棒の長さは系\(K_1\)において\(x_1=a\)から\(x_1=a+L\)まで積分した値であり、 即ち(316)が再現される。
双子のパラドックス
さて前節において一方の慣性系の時間間隔がもう一方の慣性系での時間間隔よりも遅れること を見たが、一見するとおかしなことが起きているように感じるかもしれない。 即ち、どちらの慣性系も特別であることはないので、それらの慣性系を入れ替えて考えても 同様の結論が得られることになる。 ここでよく話題に出される双子のパラドックスについて説明しよう。 静止した系に双子の兄弟がいるとする。兄はその系に留まり、弟は宇宙船に乗り宇宙旅行をして またもとの場所に戻ってくるとする。 兄のほうから見ると弟は動いているので、弟のほうが時間が遅れていることになる。 従って兄のほうが年を取っていることになる。 一方で弟から見ても兄は動いているので、兄のほうが時間が遅れていることになり、弟 のほうが年を取っていることにならないか? というパラドックスである。この問題を手っ取り早く解決する方法は、前節までのように幾何学的に兄と弟の運動を記述すること である。 簡単のため兄は慣性系\(K_0\)の(空間的な)原点に静止しており、弟が運動しているとする。 弟は\(K_0\)の原点から出発し、また\(K_0\)の(空間的な)原点に戻ってくるのである。 弟の軌跡を以下の計算を簡単にするために系\(K_0\)の座標を\((ct,x)\)で表した時
であるとする。即ち系\(K_0\)から見ると、弟は\(t=0\)に出発して\(t=\pi \)に戻ってくる。
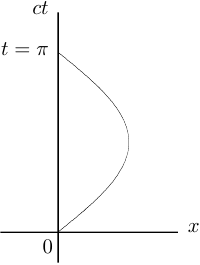
さて弟が出発して戻ってくるまでの固有時間\(\tau \)は
となる。即ち兄のほうが年を取っているのである。 系\(K_0\)を基準にして計算したが、計量が慣性系の選び方に依存しないので、この結果は 他のどんな慣性系を選んで考察しても同じ結果が得られる (ここで注意しなければならないことは、弟が常に原点にいるような座標系はもはや慣性系 ではないということである)。 このように実際にはパラドックスは発生しない。 どちらが年を取っているかを比べるには、兄と弟が同じ時空内の点にいる時でなければ 出来ない。同じ点に至るまでのそれぞれの固有時間を計算すれば必ず比較が出来る。 或いは年齢の情報を送って比較する方法も考えられるが、以前にも説明したように 相対論では異なる系の間で同時性は成り立たないので、単純な比較は意味を成さないのである。
ドップラー効果
この節では相対論的なドップラー効果について簡単に説明しよう。 最初に音波のドップラー効果を説明する。次に光のドップラー効果である。 前者の現象は非相対論的な場合のドップラー効果の相対論的拡張である。 一方、後者は完全に相対論的な現象であり、純粋に非相対論的な枠組みだけからでは 導くことが出来ない。非相対論的には光の媒質を仮定する必要性が生じるのに対して、 相対論的には光の媒質を仮定する必要が全くないからである。音波のドップラー効果
今慣性系\(K\)に対して一定の相対速度\(v_0\)で動く音源があるとする。音源に固定された 系を\(K_0\)と置く。音を媒介する空気は系\(K\)に対して静止しているものとする。 音源から発せられる音波は系\(K\)から見て音速\(v_1\)であるとする。

さて、音源からは周期\(\Delta t_0\)の音波が出ているとしよう。系\(K_0\)から見た系\(K_1\)の相対速度 (即ち音速)は\(\frac {v_1-v_0}{1-\frac {v_1v_0}{c^2}}\)で与えられる。波長はそれに\(\Delta t_0\) をかけたものに等しい。即ち系\(K_0\)から見た時、音波が発せられてから\(1\)周期の間で、座標
まで進んでいる。 これを系\(K\)で見た時、音波が\(1\)周期の間に進んだ座標\((c\Delta t,\ x)\)は、 これをローレンツ変換したものであり、
となる。\(\Delta t\)が系\(K\)から見た音波の周期である。系\(K\)から見た音波の波長は \(\lambda =x-v_0\Delta t\)である。即ち
となる。この結果は非相対論的なドップラー効果と比べて波長が長くなる。
光のドップラー効果
相対論では光の場合にもドップラー効果を考えることが出来る。 前節の結果で\(v_1\)に光の速度\(c\)を代入すれば、直ちにが得られる。この結果は前節の計算を行うまでもなく、「ローレンツ変換」の節で考察した 光円錐内の点がローレンツ変換のもとで動くことの出来る点の計算において得られている。 実際に系\(K_0\)において、光が\(1\)周期の間に進んだ周期\(\Delta t_0\)と距離(波長)\(\lambda \) を系\(K\)にローレンツ変換すれば求めるべきものが得られるからである。
相対論的力学
この節では相対論的な力学を考えよう。 これまで何度も強調しておいたように、相対論的な力学はローレンツ共変なものでないと いけない。これはMaxwell理論がそうであったように、相対論的力学も、 どのような慣性系を選んだかということには理論の(方程式等の)記述が依存しないはずである という基本的な思想に基づいている。これを相対性原理という。 ここではこの原理を満たした力学を導出することを試みてみよう。外力\(\v {F}\)のもとで運動する、質量\(m\ (\neq 0)\)の質点の運動方程式を考えよう。 ニュートン力学では、基礎方程式はニュートンの運動方程式
であった。さてこの方程式をローレンツ共変な形に拡張することを考えよう。慣性系\(K\) (座標を\((ct,x)\)とする)において 時刻\(t=0\)に質点が完全に静止した状態であったとしよう。 その瞬間においては上のニュートンの運動方程式は十分な精度で成り立つ。 また系\(K\)において\(t=0\)には\(\frac {d\v {x}}{dt}=0\)なので、\(t=0\)の時の質点の固有時間と 系\(K\)の時間間隔は等しく\(d\tau =dt\)である。即ち
である。 ここで注意すべきことは、(327)式の左辺が時間に依存しない \(\beta \)に対するローレンツ変換のもとでは、ローレンツ共変な形で書けているということである。 従って右辺もまたローレンツ共変でなければいけない。 そこでひとまず力\(\v {F}\)の第\(0\)成分を\(w\)として、 \(4\)次元ベクトル\(F^\mu =(w,\v {F})\)を定義しよう。この\(w\)の物理的な意味はここではまだ よく分からないが、後に明らかになる。 従って(327)は第\(0\)成分までまとめて
と書ける。
次に、 系\(K\)での、ある時刻\(t_0\)における質点の速度\(\v {v}(t_0)=\frac {d\v {x}}{dt}(t_0)\)に対して、 系\(K\)と(時間に依存しない)一定の相対速度\(\v {v}_0=\v {v}(t_0)\ (\beta _0=\frac {|\v {v}_0|}{c})\) で動く慣性系\(K_1\)から質点の運動を見てみよう。 系\(K_1\)での質点の座標\(x_1^\mu =(ct_1,\v {x}_1)\)は、系\(K\)での質点の座標\(x^\mu =(ct,\v {x})\) からローレンツ変換をしたものとして表すことが出来る。 また外力\(F^\mu \)も系\(K\)から\(K_1\)へ移る時にはローレンツ変換をしなければならず、 それを\(F^\mu _1\)としよう。系\(K_1\)において質点が静止していると見なせる瞬間においては 上述の質点が完全に静止した状態での運動方程式
が成立する。 これをもとの系\(K\)に移すには、系\(K\)から系\(K_1\)へのローレンツ変換の逆変換を してやればよい。以下では(実際には必要ないのだが)計算を簡単にするために \(2\)次元ミンコフスキー時空で考えよう。座標\((ct,x)\)は座標\((ct_1,x_1)\)を用いて
と書けるので、これを用いて
が導かれる。ここで
である。この方程式は系\(K_1\)において質点が静止して見える瞬間においてのみ 成立する方程式である。しかし質点の速度が変化するごとに、質点と同じ速度で移動する 系\(K_1\)を取り直せば、その都度(331)が得られるのが分かる。従って一般的に (332)の\(\beta _0\)を質点の速度に置き換えた時の (331)式が相対論的な運動方程式である。 これは明らかにローレンツ変換のもとで共変である。 ここで系\(K_1\)から見た外力\(F_1^\mu \)は質点と同じ速度で運動しないと直接決定することが出来ない。 外力もローレンツ変換を受けるために、系\(K_1\)と系\(K\)とでは異なってしまうからである。 従って次の目的は系\(K\)で見た時の質点に働く相対論的な力を求めることである。
(ここで(332)の\(\beta _0\)が時刻に依存するように置き換える際に、 はじめから\(\beta _0\)を時刻に依存するようにしてはいけないのかという疑問が生じるかも しれない。しかし注意しないといけないのは、\(\beta _0\)が時刻に依存するようにしてしまうと、 系\(K_1\)はもはや慣性系ではなくなるということである。 従って、そうしてしまうと系\(K_1\)では特殊相対性理論が適用できなくなってしまう。 あくまでも各瞬間瞬間では上記運動方程式(331)が成立するから、 最終的には\(\beta _0\)が時刻に依存した一般的な方程式が成立するといえるのである。 また次の点にも注意すべきである。 即ち、時空の関数として与えられるローレンツ群の元は一般には座標変換として表すことが 出来ないということである。時空の関数であるローレンツ群の元\(\Lambda ^\mu _{\ \nu }(x)\)に対して、 もしローレンツ変換が
と書けるならば、いわゆる積分可能条件
を満たさないといけない。逆にこの条件を満たすならば、ポアンカレの補題("トポロジー"note を参照)により(333)と書けるのである。 また、この条件が満たされる時には
となるので、変換前の座標系においてレビ・チビタ接続が\(0\)であれば、変換後の座標系においても レビ・チビタ接続は\(0\)となる(この辺の話は"ゲージ理論"noteを参照)。 これは言い換えれば、相対論的運動方程式 が慣性系の選び方に依存しない、或いは同じことであるがローレンツ共変である ということを意味している。)
相対論的な扱いのすでに分かっている電磁場について、荷電粒子の受ける力を考察してみよう。 ここで質点が電荷\(e\)を持つ荷電粒子であるとしよう。 慣性系\(K_1\)において電磁場が\(F_1=*\v {B}_1+\v {E}_1\w dt_1\)で与えられるとしよう。 系\(K_1\)での荷電粒子が静止していると見なせる瞬間の時刻\(t_1\)においては やはり十分な精度でニュートン力学が成立すると考えられる。 その瞬間には荷電粒子の速度は\(0\)なので、荷電粒子の受ける力は
で与えられる。さて、これを系\(K\)にローレンツ変換するにはこれをローレンツ共変な形で 表さないといけない。系\(K\)において電磁場が(118)で与えられるとすると 系\(K_1\)では(119)の形で与えられる。 (119)の最初の列ベクトルが\(\v {E}_1\)であるので、 \(E^i_1=-F_1^{i0}\)と書ける。これはこのままではローレンツ共変な形ではない。 ここで\(4\)次元ベクトル \(\frac {dx^\mu }{d\tau }= (\frac {cdt}{d\tau },\frac {dx}{d\tau },\frac {dy}{d\tau },\frac {dz}{d\tau })\) は系\(K_1\)での時刻\(t_1\)においては\(\frac {dx^\mu _1}{d\tau }=(c,0,0,0)\)と書けるので 荷電粒子の受ける力は\(v_1^\mu =\frac {dx^\mu _1}{d\tau }\)と置けば
と表すことが出来る。これはもはやミンコフスキー時空での\(4\)次元ベクトルとして表されている のでローレンツ共変である。かくして、これを系\(K\)に移してやれば、 慣性系における電磁場中での荷電粒子の相対論的な運動方程式
が得られる。成分をあらわに書けば
となる(第\(1\)式目は全体に\(c\)をかけている)。第\(2\)式からは、 \(\beta \ll 1\)とすると実際に非相対論的な荷電粒子の運動方程式が得られる。 左辺の第\(1\)項目が電場から受ける力であり、第\(2\)項目がアンペール力である。
さて、ニュートン力学でそうであったように相対論においてもエネルギーの時間変化は、質点が 単位時間当たりになされる仕事であり、運動量の時間変化が質点の受ける力であると定義 される。(339)式の右辺を見てみると、 これは荷電粒子が単位時間当たりに電磁場からなされる仕事である。従って \(4\)次元ベクトル\(mv^\mu \)の第\(0\)成分は粒子の持つエネルギーである。 と解釈することが出来る。 このような意味合いにおいて、一般に粒子の受ける力の\(4\)次元ベクトル 表現\(F^\mu \)の第\(0\)成分は、粒子がその力によって単位時間当たりになされる仕事であると 結論付けることが出来る。 まとめると質点の持つエネルギー\(E\)と運動量\(\v {p}\)は、\(4\)次元運動量ベクトル
としてまとめられる。\(c\ll 1\)として\(\frac {1}{c^2}\)の項を無視すれば 運動量は\(\v {p}=m\v {v}\)となり、ニュートン力学を再現することが分かる。 エネルギーに関しては\(E=\frac {mc^2}{\sqrt {1-\beta ^2}}\)であり、\(\beta ^2\)のベキで展開すれば
となる。右辺の第\(2\)項はニュートン力学での質点のエネルギーである。 第\(1\)項目はニュートン力学には現れない。 これは質点の運動に依存せず、質量にのみ依存する定数である。 従ってこれは質量\(m\)の物体がもともと持っているエネルギーである と解釈することが出来る。
質点のエネルギーまたは運動量を見てみると、\(\frac {1}{\sqrt {1-\beta ^2}}\) のfactorが付いている。これは慣性系から見た質点の速度に依存している。 質点の運動量を慣性質量と速度の積であると定義するならば、質点の速度は\(\v {v}\)なので \(\frac {m}{\sqrt {1-\beta ^2}}\)は質点の慣性質量と定義されることになる。 この意味で慣性質量を定義するならば、定数\(m\)とははっきりと区別を付ける必要がある。 この意味において定数\(m\)を静止質量と呼ぶ。 従って相対論的な議論を行う際には、質量と言った時にどちらの意味の質量なのかを はっきりさせておかないと意味を成さないことに注意されたい。 以下において質量と言う時は、特に断らなければ静止質量を指すものとする。
最後に、静止質量が\(0\)の粒子の運動は以上の導出によっては導くことが出来ない。 静止質量が\(0\)の粒子としては光子などのゲージ粒子などがある。 それら粒子の運動方程式は上記の最後の結論である、粒子のエネルギーと運動量の時間変化が、 それぞれ単位時間当たりのなされた仕事、受ける力に等しいとして得られるであろう。
ラグランジュ形式
質量を持った粒子のラグランジアン
この節では 相対論的な質点の運動の、ラグランジュ形式での扱い方について説明しよう。 質点の運動を表すラグランジアンが何であるかを考えてみよう。 ラグランジュ形式ではラグランジアンが与えられれば、ラグランジアンの停留する経路が 運動方程式の解である。 従ってラグランジアンは運動の経路に沿った積分が最も作用を最小にするようなものである必要 がある。 ここで「双子のパラドックス」の節で説明したように、慣性系において出発点と終着点が 同じである場合、外力が働かない時には静止した状態が最も固有時間が長いというのが分かった。 従って任意の慣性系にローレンツ変換を行えば、時空内の任意の\(2\)点の間を運動する質点 の固有時間は、その\(2\)点間を等速直線運動した経路が最も固有時間が長くなる。 従って作用積分はで与えれる。実際に\(x^\mu \)に関して変分を取って計算してみよう。計算は最後の等式を使うのが 便利である。
従って相対論的な運動方程式が得られる。
電磁場中での荷電粒子のラグランジアン
「電磁場中の電子の非相対論的記述」の節にて説明したように、非相対論的な荷電粒子の 電磁相互作用項は\(e\v {A}\cdot \v {v}-e\phi \)で与えられた。 従って相対論的な電磁相互作用を与える作用は、電磁ポテンシャル\(A=\v {A}-\phi cdt\)を用いてで与えられるであろう。ここで\(C\)は\(4\)次元ミンコフスキー空間中の質点の軌跡である。 実際に\(x^\mu \)に関する変分を取ってみると
となる。従って荷電粒子の作用を
で定義すれば、実際に電磁場中の荷電粒子の相対論的運動方程式(338) が導かれる。
連続的に分布する物質の相対論的運動
電磁相互作用をする連続体
前節で質点の運動に対する相対論的な記述を得ることが出来た。 この節では、それを少しだけ拡張することにより連続的に分布する物質(連続体) の相対論的な運動方程式を導いてみよう。 連続体の占める(\(3\)次元的な)領域は時間経過に伴い、連続体と共に動いていく。 従ってそのことを強調するために、慣性系\(K\)における時刻\(t\)を用いて 連続体の占める領域を\(D_t\)と書くことにする。 連続体内の点\(x\)が静止していると見なせる系での点\(x\)の質量密度を\(\mu =\mu (x)\)とする。 これは\(D_t\)の外側の領域では\(\mu (x)=0\ (x\notin D_t)\) である。この連続体内の点\(x\)の\(4\)次元運動量密度ベクトルは、\(x\)での\(4\)次元速度ベクトル を\(v^\mu =v^\mu (x)\)とすればと書ける。この第\(0\)成分の\(\frac {1}{c}\)倍が、系\(K\)から見た点\(x\)の質量密度を与える。 "幾何のお話"noteによれば、ある量\(\rho \)の保存則に関する幾何学的表現 (即ち連続方程式)は、\(4\)次元速度ベクトルからなる1-form \(v=v_\mu dx^\mu \)に対して
となるのが分かる(この積分は\(dx^0=cdt\)成分に関しては積分しないものとする)。 従って\(\rho =\mu c^2\)とすればエネルギーの時間変化率が、また \(\rho =\mu \v {v}\)とすれば運動量の時間変化率が得られる。 こうして連続体の場合には次のエネルギー・運動量テンソル
が定義出来る。従って連続体に外力が働かない場合の運動方程式は、連続方程式
により与えられる。
さてこの連続体が電荷を持つ場合に、電磁場から受ける力はどのように 書けるであろうか。連続体の運動方程式の慣性力の項が 物質のエネルギー・運動量テンソルの保存則で表現出来たのであるから、 電磁場との相互作用がある場合には、相互作用の項が 同様に電磁場のエネルギー・運動量テンソルの保存則 (125)で表現出来るものと期待出来る。 実際に計算すると(129)より
ここでMaxwell方程式(35)及び(36)は成分をあらわに書くと
と書ける。この\(2\)式目を用いると(352)の右辺\(2\)段目の第\(1\)項目 と第\(2\)項目とが打ち消しあう。 また\(1\)式目を(352)の第\(3\)項目に(\(F^{\mu \nu }=-F^{\nu \mu }\)に注意して) 代入すると、最終的に
となる。 さて、ここで連続体を微視的に見てみよう。 連続体を構成する粒子が質量\(m\)、電荷\(e\)を持つものとする。 連続体が完全に静止していると仮定した時、連続体中の粒子の個数密度を\(n_0\)としよう。 そうすると、完全に静止している連続体中の質量密度は\(\mu =mn_0\)であり、 電荷密度は\(\rho =en_0\)である。 また、運動している連続体中の粒子の\(4\)次元個数密度ベクトルを \(n^\mu =\frac {1}{c}n_0v^\mu \)で定義すれば、 連続体の\(4\)次元運動量密度ベクトルは\(p^\mu =mcn^\mu \)となり、 \(4\)次元電流密度ベクトル(カレント)は\(J^\mu =en^\mu \)で与えられる。 従って
である。 従って電磁場のエネルギー・運動量テンソルの保存則は
となる。これを荷電粒子の相対論的運動方程式(338)の右辺と見比べてみると、 ちょうど電磁場から受ける力が現れているのが分かる。
まとめると、電磁場中の連続体の運動方程式は物質と電磁場の 全エネルギー・運動量テンソルの保存則
で表すことが出来る。
以上のように連続体の相対論的運動方程式は連続の方程式の形で表すことが出来る。 ではテンソルとして表される\(M^{\mu \nu }\)などの量の物理的な意味を簡単に電磁場の存在しない 場合で考えてみよう。まず連続方程式の第\(0\)成分を見てみると
ここで\(u^i=\frac {dx^i}{dt}\)である。 この第\(1\)項目はエネルギーの時間変化率である。 第\(2\)項目は運動量の発散となっている。 従ってこれを座標系に固定された領域\(D\)内で積分すると、
となる。これを見て分かるように、 \(D\)内のエネルギーの時間変化率は\(D\)を出入りするエネルギーのflux(流れ)、即ち運動量 であることが分かる。次に第\(i\)成分を見てみると
今度は第\(1\)項目は運動量の時間変化率であり、第\(2\)項目は運動量のfluxである。
巨視的な連続体の相対論的運動
連続体に関する一般的な相対論的な記述を見ておくのは有用であると思う。 連続体の占める領域を\(D\)としよう。一般的に言って物体の内部に力が働く時、 物体内の微小領域の表面上には物体を押す力(圧力)以外にも摩擦や物体を形成する分子間に働く力 などの外部との相互作用等により 生じる応力が存在する。 応力は一般に物体が変形する際に、物体内部に働く力を表したものである。 一般的な場合を考える前に、 微小な直方体について簡単に考察をしてみよう。 基準となる慣性系においてこの直方体が静止していると見なせるものとする。 また、直方体の各辺に平行になるように座標系を取ることにする。 直方体の各辺の長さを\(\Delta x\)、\(\Delta y\)、\(\Delta z\)とする。 例えば下図のように\(y-z\)平面に対して平行な、直方体の面\(\Delta S\) に対して働く単位面積当たりの力を \(\sigma _1=(\sigma _{11},\sigma _{21},\sigma _{31})\)としよう。
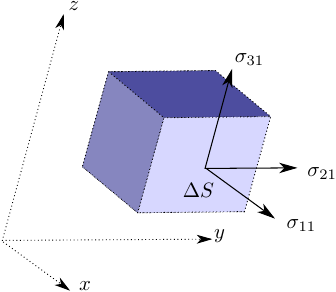
この時、この面\(\Delta S\)に対して働く力の\(z\)成分は \(\sigma _{31}\Delta y\Delta z\)で与えられる。 連続体の変形に伴い、面\(\Delta S\)に隣接する別の直方体の面からこの面に対して力が働く時、 反対側の面\(\Delta S'\)に隣接する別の直方体の面からは反対向きの力が働く。 従って面\(\Delta S\)の反対側の面\(\Delta S'\)に働く単位面積当たりの力は \(-(\sigma _{11}-\frac {\pd \sigma _{11}}{\pd x}\Delta x, \sigma _{21}-\frac {\pd \sigma _{21}}{\pd x}\Delta x, \sigma _{31}-\frac {\pd \sigma _{31}}{\pd x}\Delta x)\) で与えられる。 他の面に対しても同様に単位面積当たりの力を\(\sigma _2=(\sigma _{12},\sigma _{22},\sigma _{32}) ,\ \sigma _3=(\sigma _{13},\sigma _{23},\sigma _{33})\)とすれば、 図でこちらから見えている側の面に対して働く力の\(z\)成分の合力は \(\sigma _{31}\Delta y\Delta z+\sigma _{32}\Delta z\Delta x+\sigma _{33}\Delta x\Delta y\) で与えられることになる。この面の反対側に働く力は、反対向きに \((\sigma _{31}-\frac {\pd \sigma _{31}}{\pd x}\Delta x)\Delta y\Delta z +(\sigma _{32}-\frac {\pd \sigma _{32}}{\pd y}\Delta y)\Delta z\Delta x +(\sigma _{33}-\frac {\pd \sigma _{33}}{\pd z}\Delta z)\Delta x\Delta y\)となる。 これらの差がこの直方体全体に働く力の\(z\)成分\(F_3\)を与える。従って \(F_3=(\frac {\pd \sigma _{31}}{\pd x}+\frac {\pd \sigma _{32}}{\pd y} +\frac {\pd \sigma _{33}}{\pd z})\Delta x\Delta y\Delta z\)が得られる。 このことから一般的に、 領域\(D\)に働く力の第\(i\)成分\(F_i\)は、ある1-form \(\sigma ^i=\sigma ^i_{\ j}dx^j\)を用いて
の形に書けることが分かると思う。 この時\(\sigma _{ij}\)を応力テンソルという。 これらが微小直方体の受ける力、即ち運動量のfluxを与える。 今は考えている微小直方体が静止している系を選んでいるので、運動量は\(0\)である。 従ってこれらとエネルギー密度\(E\) と合わせてエネルギー・運動量テンソルを成すことが分かる。 即ち
ここで\(\frac {E}{c^2}\)は質量密度を与える。\(0\)の成分が運動量密度である。
ここまでは微小な直方体が静止していると見なせる慣性系において考えたが、 物体の他の領域や、今選んでいる系とは異なる任意の慣性系の場合には、上記エネルギー・運動量 テンソルをローレンツ変換することにより得ることが出来る。
特に応力テンソルが対角形である場合には、完全流体と呼ばれる。 この場合にも任意の慣性系へ座標変換を行でば、一般には対角形とは限らない。 さらに対角成分が全て等しい場合にはパスカルの法則を導く。
自明でないトポロジーを持つ空間での電磁気学
電磁場
ここまでは通常の\(4\)次元ミンコフスキー時空における電磁気学を説明してきた。 この節で簡単に説明する内容は実用性はあまりないので、実用的なもののみに興味のある 読者は読み飛ばされたい。 記号の意味やトポロジーに関する内容に関しては"トポロジー"note (或いは"トポロジー2"noteの内容も必要かもしれない)を参照されたい。この節では\(4\)次元の時空\(M\)のトポロジーが、ある\(3\)次元多様体\(N\)及び\(\mathbb {R}\)に対して \(N\times \mathbb {R}\)に等しい、即ち\(M\simeq N\times \mathbb {R}\)である場合を考えよう。 ただし、\(M\)はflatであると仮定する。即ち局所的には通常の\(4\)次元ミンコフスキー時空に 完全に等しいものとする。 例えば\(N=S^3\)の場合には、\(M\)の空間部分は\(D^3\)の境界 を同一視したものとトポロジーが等しい。
このような設定のもとで\(M\)上の電磁場がMaxwell方程式を満たすものとする。 Maxwell方程式より\(d_4F=0\)でる。ここで \(N\)は\(M\simeq N\times \mathbb {R}\)の変位レトラクトである。 従って\(H^2(M)\simeq H^2(N)\)である。従って\(H^2(N)=0\)であれば、電磁ポテンシャル \(A\in \Omega ^1(M)\)が存在し、\(d_4A=F\)である。 \(H^2(N)\neq 0\)の場合にはもはや大域的には電磁ポテンシャルを定義することが出来ない。 従って\(N\)を、それぞれが\(1\)点に可縮な開被覆\(\{U_\alpha \}\)に対して、各\(U_\alpha \)上では 電磁ポテンシャルが定義出来る。\(U_\alpha \)上の電磁ポテンシャルを\(A_\alpha \)と書くと、 \(\alpha \neq \beta \)の時\(U_\alpha \cap U_\beta \neq \emptyset \)の場合には、 \(A_\alpha -A_\beta =d\theta _{\alpha \beta }\)と書くことが出来る。 即ち異なる\(U_\alpha \)上の電磁ポテンシャル同士は、ゲージ変換した分だけの違いがある。
コンパクトな空間での電磁場
時空\(M\simeq N\times \mathbb {R}\)に対して\(N\)が境界がなくコンパクトであるとする。 \(N\)上での静電場を簡単に考えてみよう。\(N\)上に点電荷が\(1\)つ存在する場合にはポアソン方程式 はといった形で表される。ここで\(\delta \)は\(N\)上のデルタ関数である。 さてこの方程式を満たすスカラー・ポテンシャル\(\phi \)が存在したとする。 点電荷を囲む領域\(U\subset N\)に対して
一方で\(U\)の外では恒等的に\(d*d\phi =0\)であるので、\(U^c=N\backslash U\)においては
ところが\(\pd U=\pd U^c\)(向きは逆になる)であるので、ストークスの定理により
となり矛盾してしまう。即ちこのような空間には点電荷は単体では存在し得ない。 一般的にいって\(N\)上に電荷\(e\)の点電荷と電荷\(-e\)の点電荷が同数存在する場合にのみ、 矛盾が生じない。従って境界がなく、コンパクトな空間\(N\)上に存在する全ての 電荷の和は\(0\)である。
このサイトの管理人のTKGです。
いくつか昔頑張って作った自作のテキストPDFをサンプルとして投稿しています。
みなさんご自由にお気軽にノートを投稿してください!
ノートは結構昔に書いていて文章をやや硬くかいていますが、ちょっとテキストを意識しすぎていました。あしからずです。